GAMES101-03:变换1:2维变换
三、变换1:2维变换
变换:
- Modeling:模型变换,物体在3D空间中的运动
- Viewing:视图变换,3D到2D的投影
3.1 2D Transform
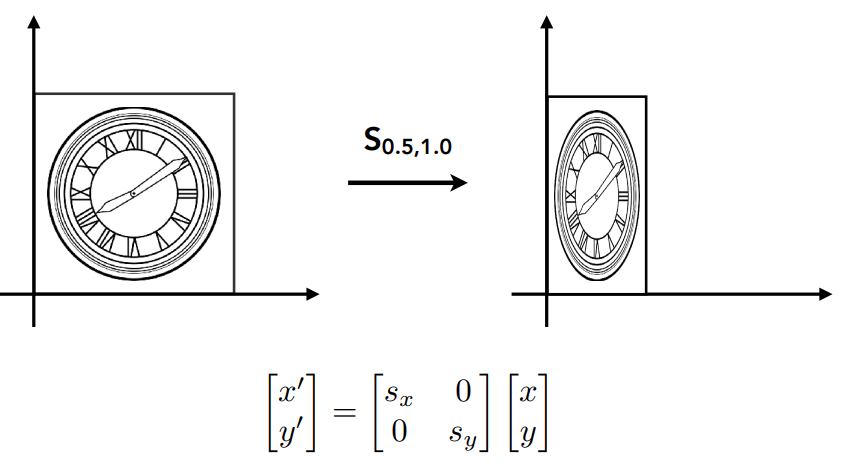
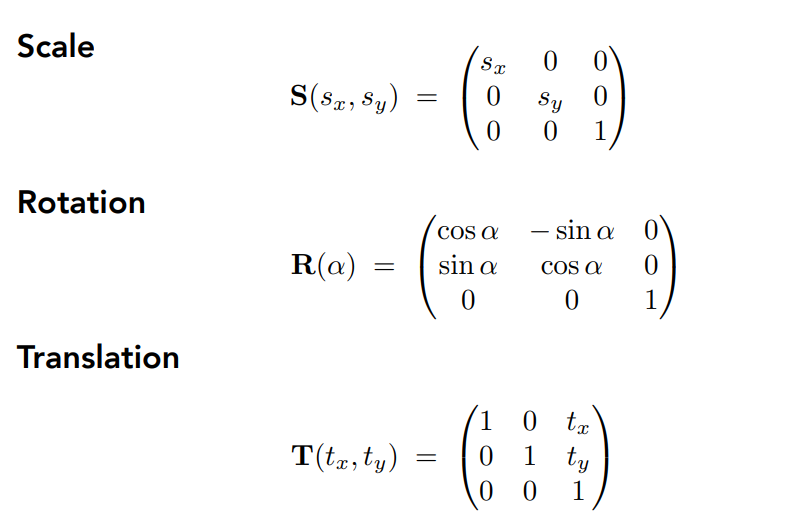
3.1.1 Scale缩放变换
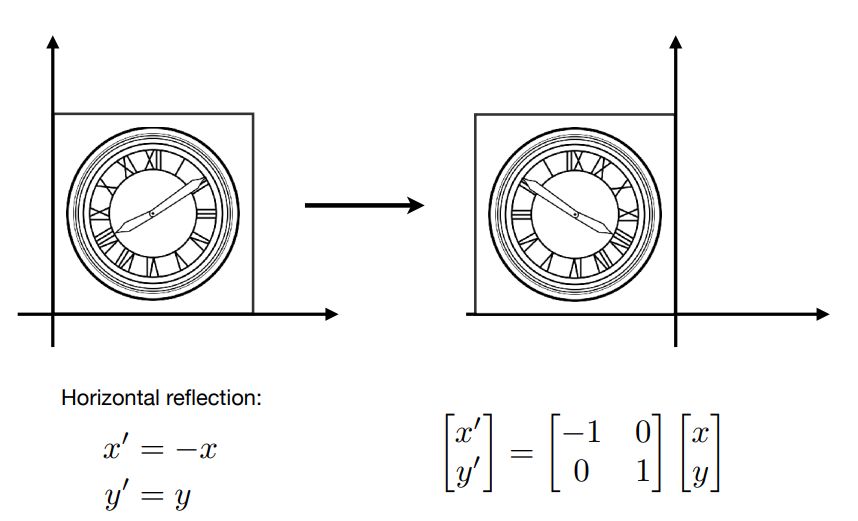
3.1.2 Reflectin翻转
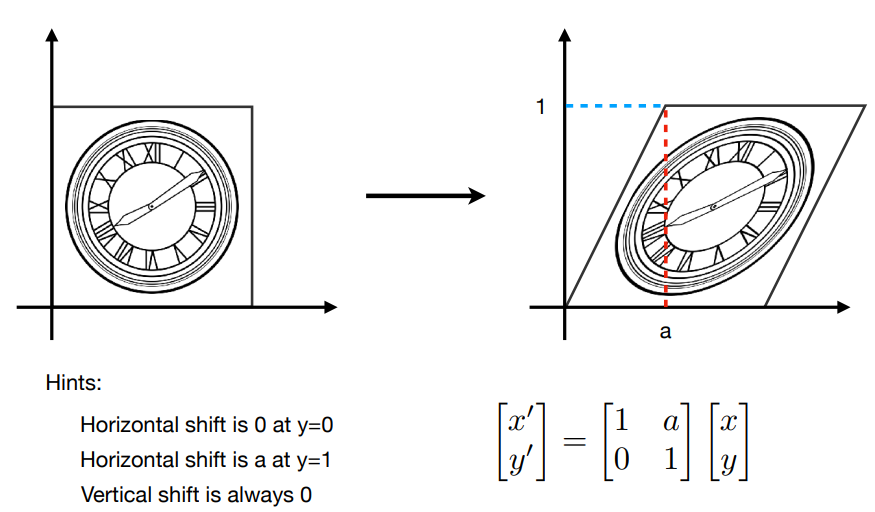
3.1.3 Shear切变
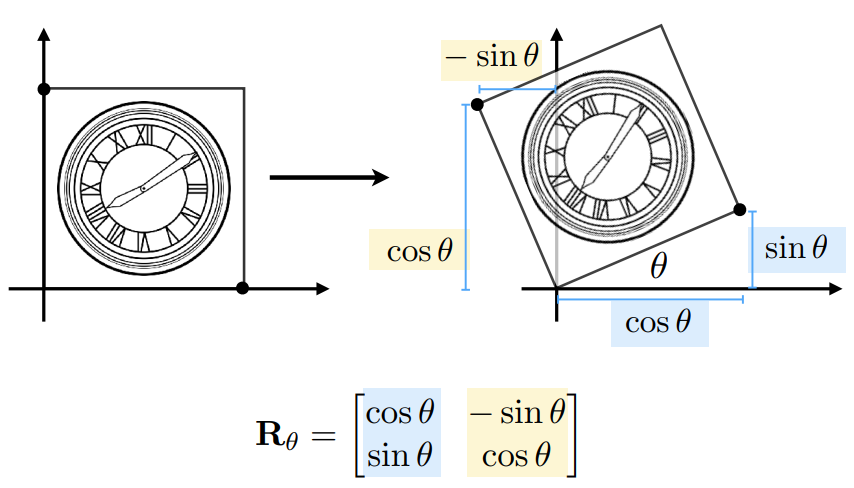
3.1.4 Rotate旋转(默认 绕原点 逆时针 旋转)
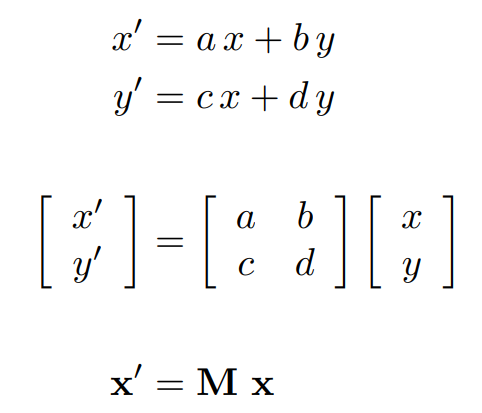
3.1.5 Linear Transform线性变换=矩阵
3.2 Homogeneous coordinates齐次坐标
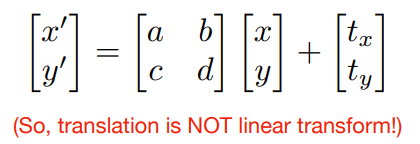
3.2.1 Translation平移变换\(\notin\)线性变换
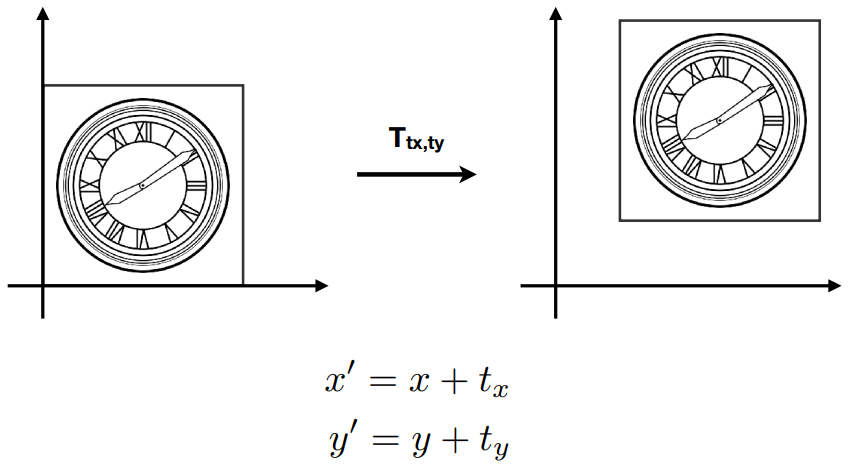
矩阵表示:
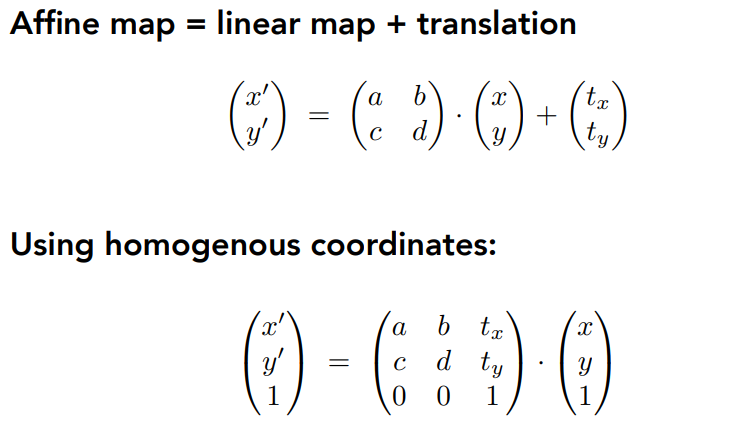
3.2.2 齐次坐标
添加一个维度
- 2维点:\((x,y,1)^T\)
- 2维点的补充形式:\((x,y,w)^T\)与\((\frac{x}{w},\frac{y}{w},1)^T\)等价
- 2维向量:\((x,y,0)^T\)
对于两者第3个坐标的解释:
- 点的第三维为0,向量的第三维为1,可以满足向量的平移不变性
- 且可以满足以下性质
- vector + vector = vector
- point - point = vector
- point + vector = point
- point + point = 两个point的中点
3.2.3 Affine Transformation仿射变换 = 线性变换 + 平移变换
3.2.4 2D Transformation
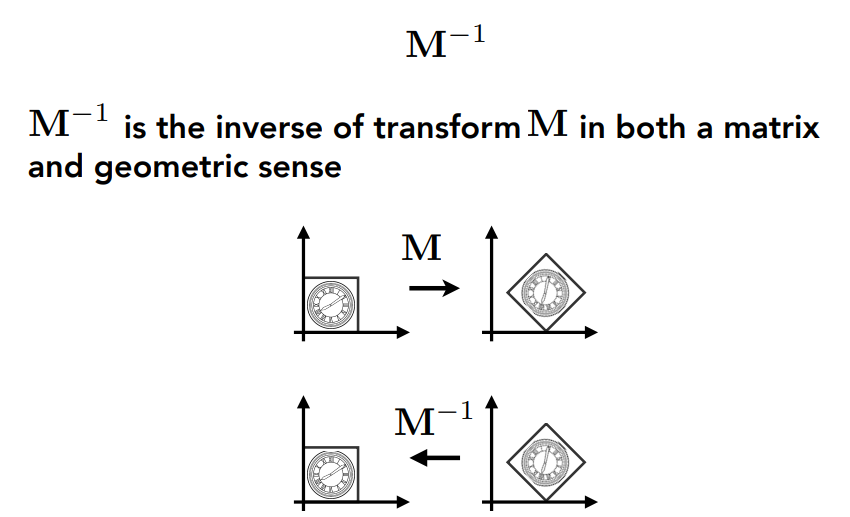
3.2.5 Inverse Transform逆变换
逆变换 <==> 乘变换矩阵的逆矩阵
3.3 Composing Transforms变换的组合
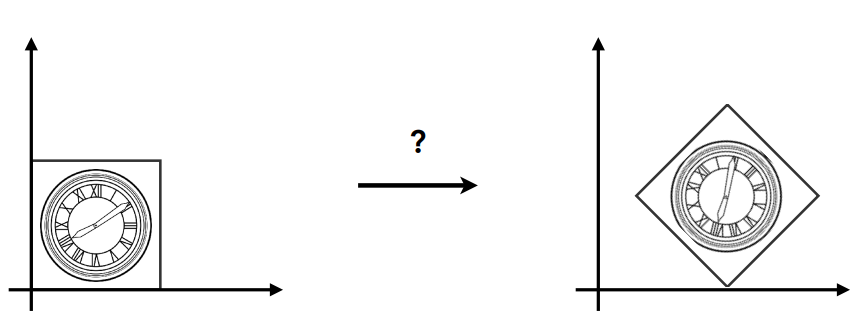
3.3.1 举例
- 复杂变换可以有简单变换组合而成
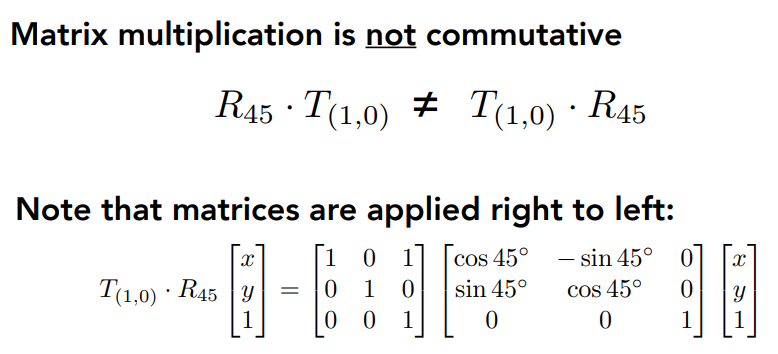
- 简单变换的顺序是很有必要的 <==> 矩阵乘法不满足交换律
变换的目标:
变换的方法:先平移后旋转 or 先旋转后平移
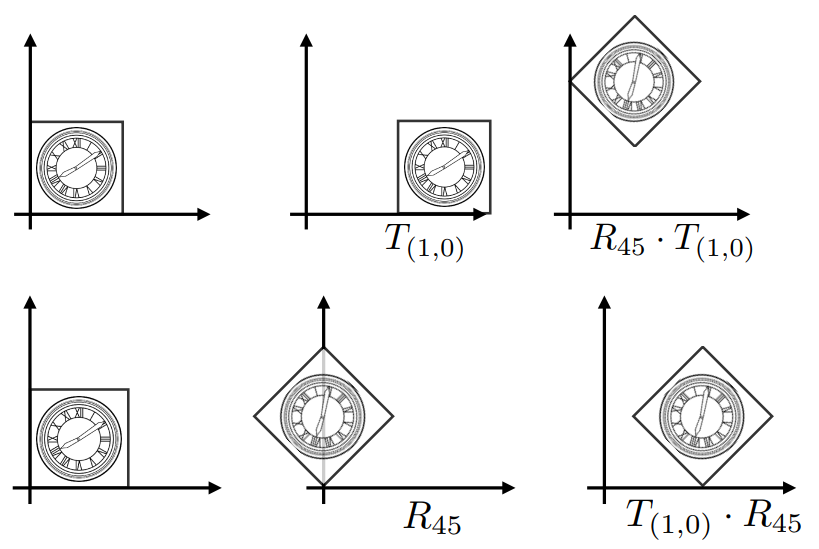
矩阵表示:从右到左进行矩阵乘法,顺序为:缩放 => 旋转 => 平移
3.3.2 多个变换
假设有一系列仿射变换\(A_1,A_2,A_3...\)
可以用矩阵乘法表示:
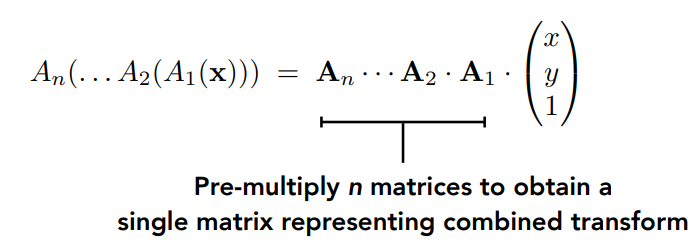
可以先计算\(A_n...A_2·A_1\),再与列向量相乘
- 一个3*3的矩阵可以表示任意的变换
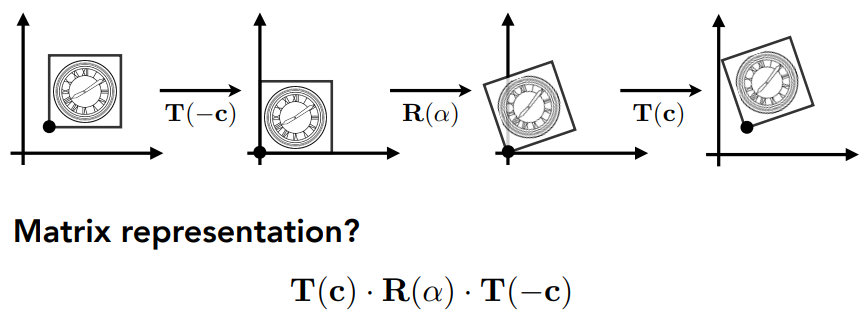
3.3.3 变换的分解
以C点为中心进行旋转\(\alpha\)度:\(T(\vec{c})·R(\alpha)·T(\vec{-c})\)
- 先将图形按照\(\vec{-c}\)的方向进行平移:\(T(\vec{-c})\)
- 然后绕原点旋转\(\alpha\)度:\(R(\alpha)\)
- 然后将图形按照\(\vec{c}\)的方向进行平移:\(T(\vec{c})\)
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 华风夏韵!
评论