GAMES101-19:相机&透镜&光场
十九、相机&透镜&光场
19.1 相机
快门:控制光在某个极短时间内进入相机
传感器:将光的信息记录下来,只能记录Irradiance,不能记录radiance,因此需要小孔/棱镜成像
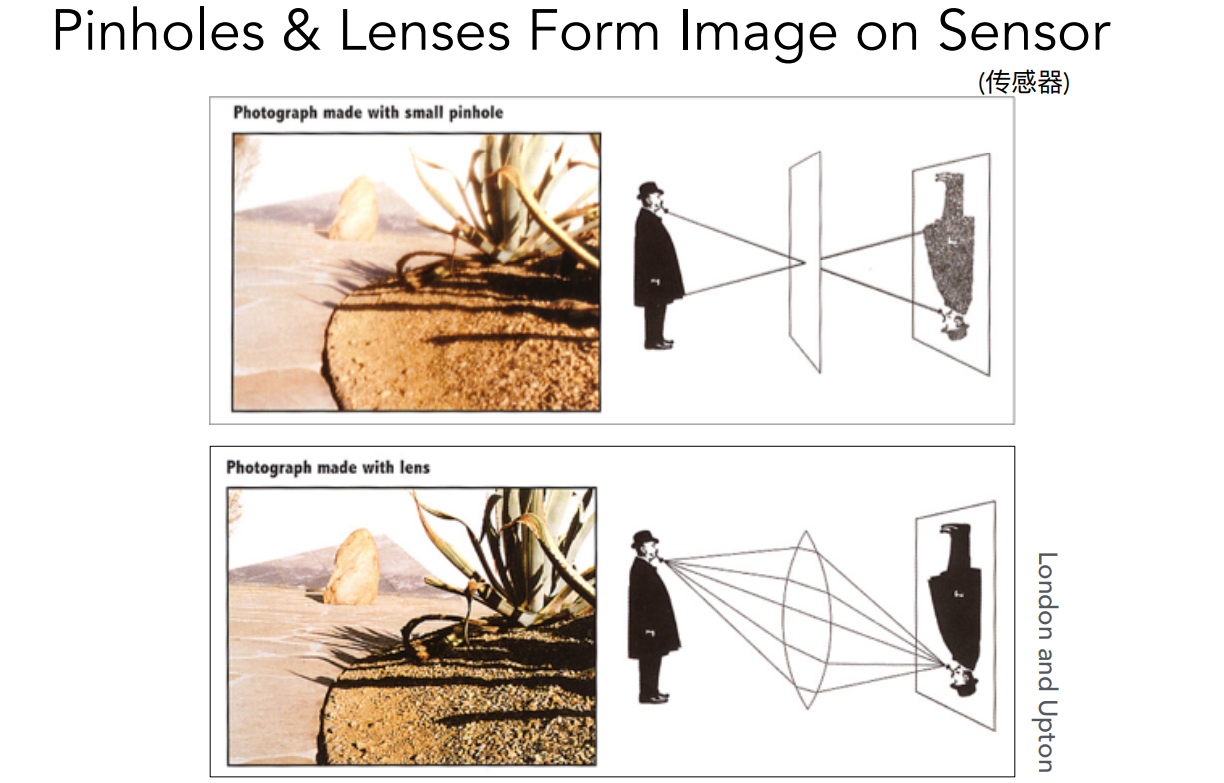
19.1.1 针孔相机
- 没有景深的效果,不会模糊
19.1.2 基础概念
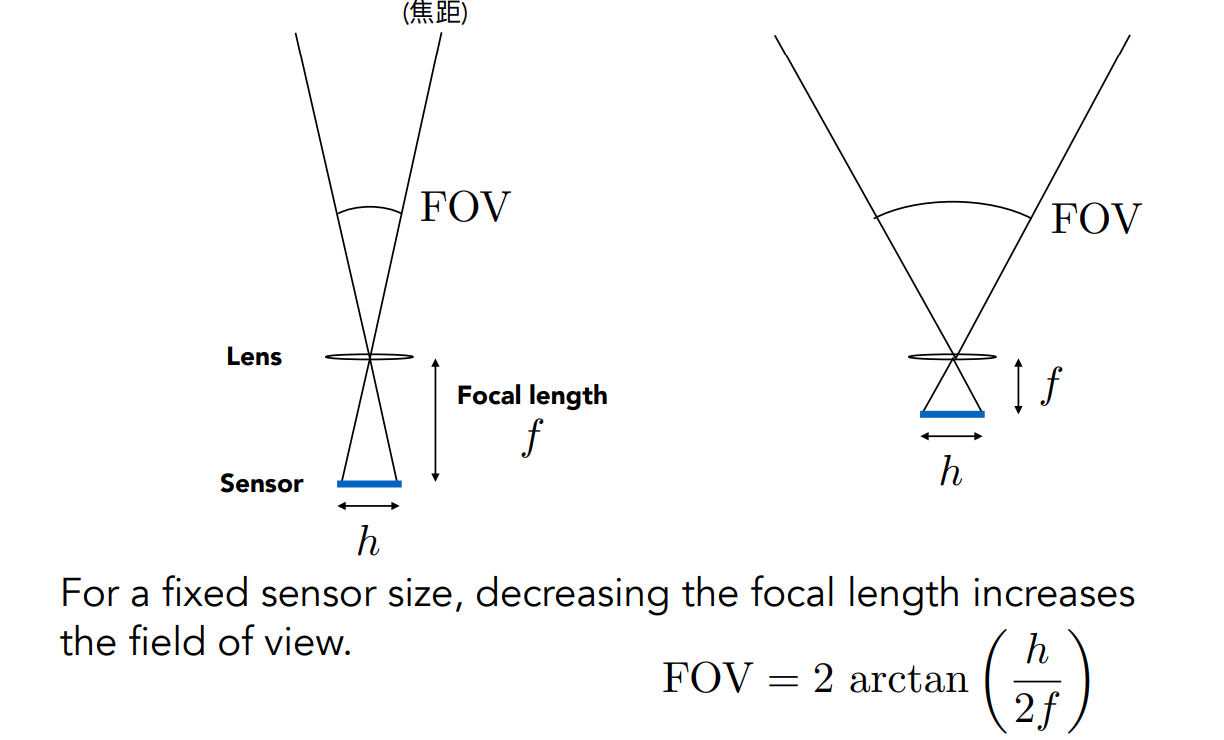
19.1.2.1 视场 FOV
FOV:视场
- 传感器高度:h
- 传感器到小孔的距离:焦距f
- 焦距越大,视场越大
- 传感器越小,视场越小
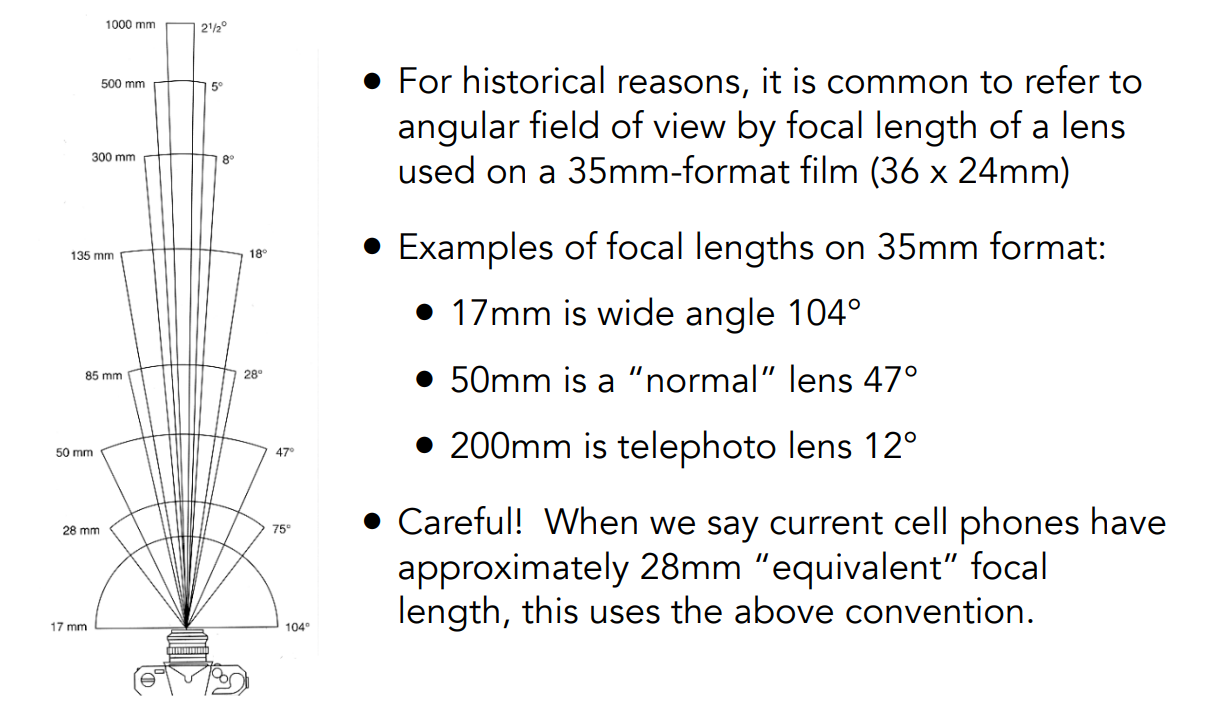
以35mm格式的胶片为标准,通过更改焦距f,定义视场
- 也就是确定了传感器高度h
- 通常说的是等效到35mm格式,而不是传感器就是35mm
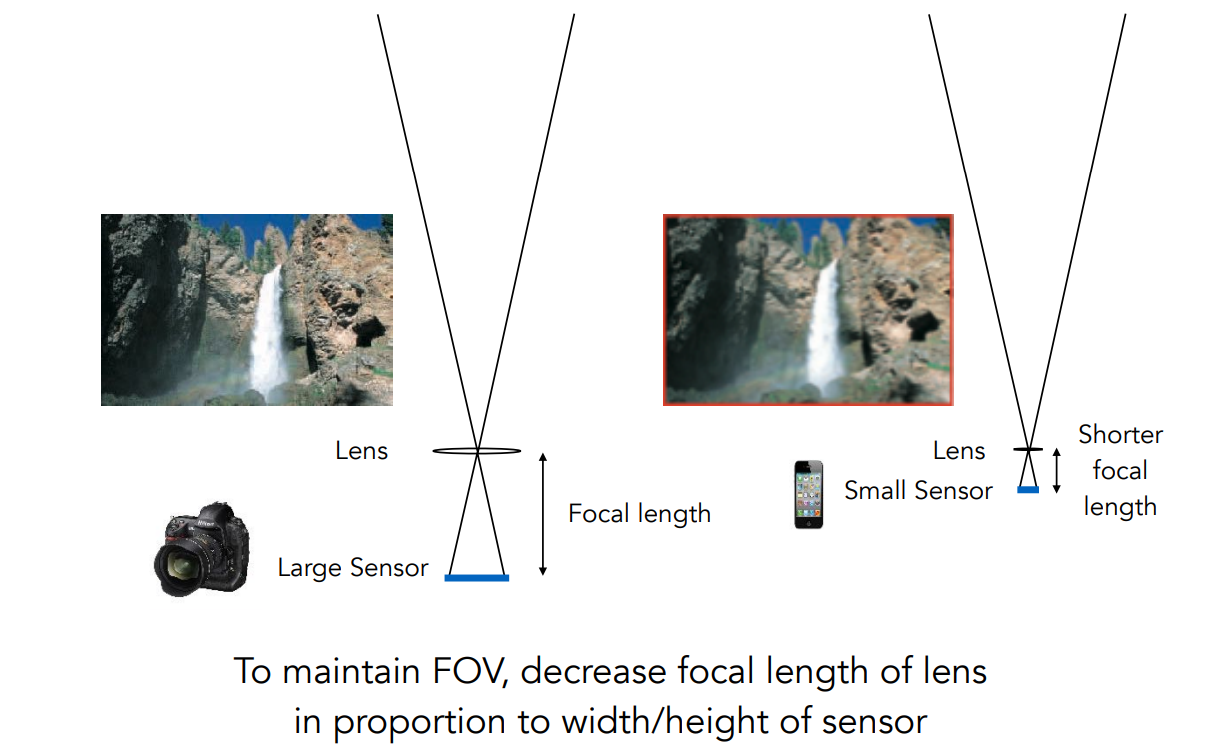
传感器sensor和胶片film可以不一样,但可以当作是一样的
- 传感器:接收到了具体信息
- 胶片:最后呈现的效果
小的传感器 + 小焦距,可以得到相同的视场
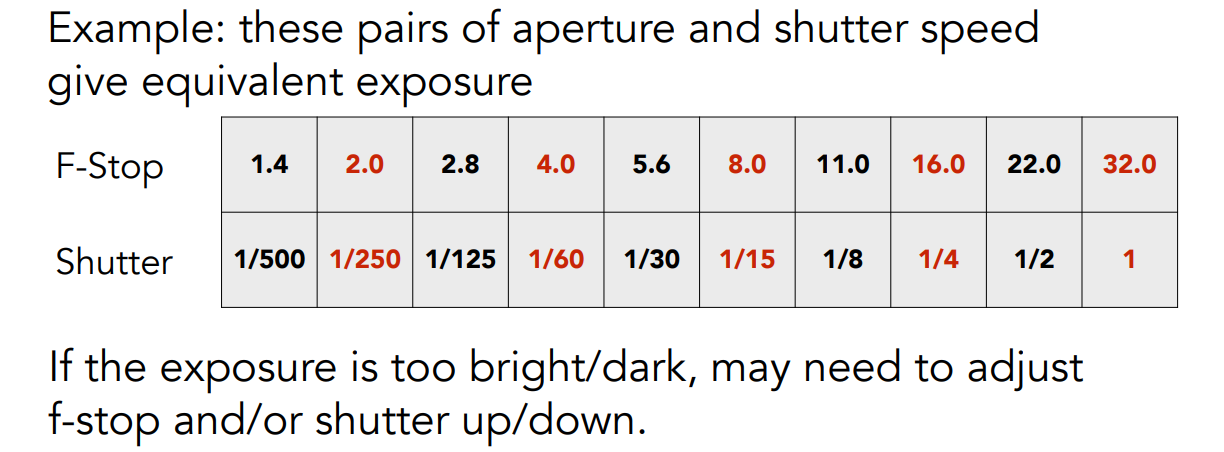
19.1.2.2 曝光度 Exposure
Exposure = 时间(T) × Irradiance(E)
- 时间越长、单位时间内接收到的能量越多,最后的曝光度越大
- 曝光度记录的是energy,而不是power
- 时间:由快门控制
- Irradiance:由很多因素决定,如光圈
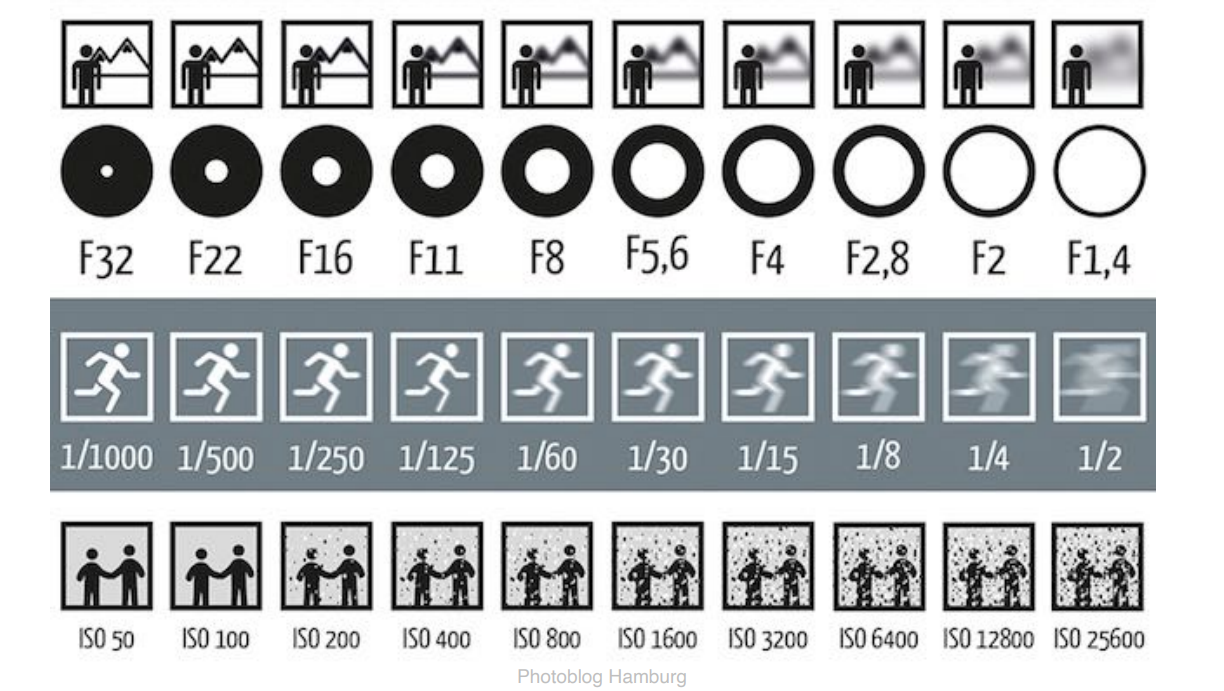
19.1.2.3 影响曝光度的因素:光圈&快门&ISO
- 光圈Aperture
Size:用
FN或F/N表示- 模拟人的瞳孔,通过F-stop/F-number控制开关
- N对应光圈半径的倒数
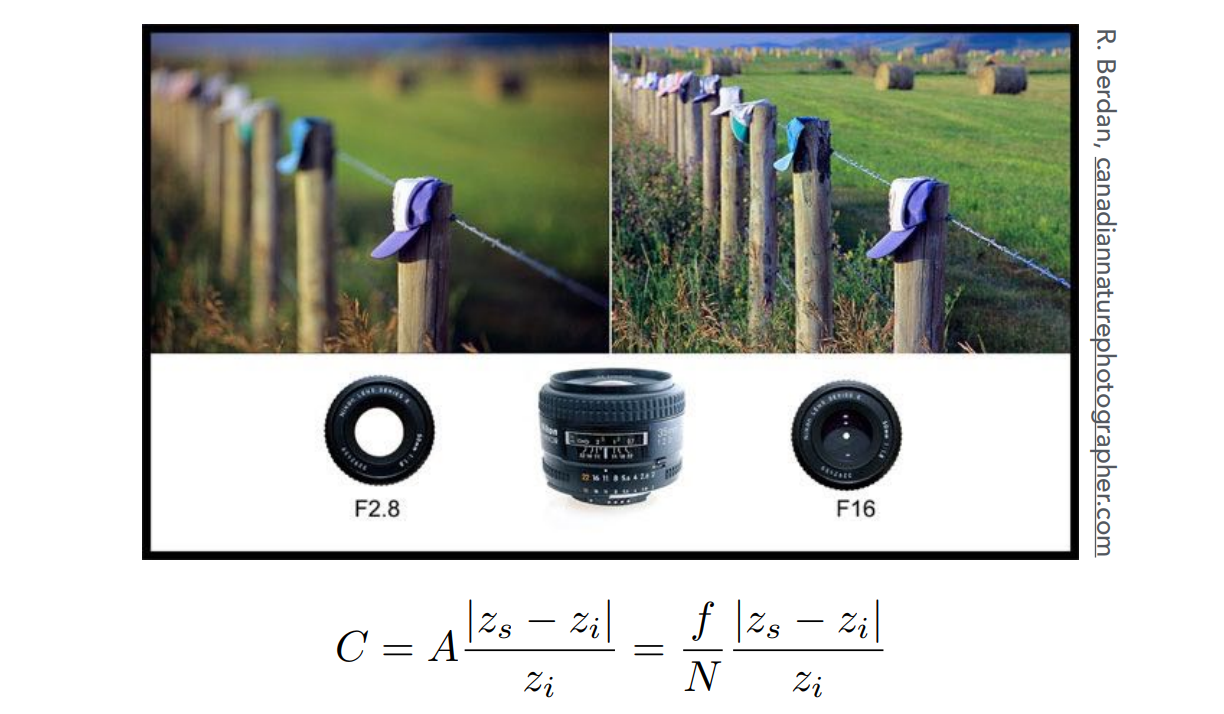
- 光圈越大,越亮,但是远的部分越模糊
- 如果要考虑景深,光圈就应该小,图像就会暗,因此就需要更长的快门时间,从而无法考虑运动模糊的问题
- 快门Shutter speed:用分数表示
- 控制记录的时间
- 时间越长,越模糊
- 因为存在运动模糊效果:对快门时间内记录到的所有信息做了一个平均
- 相当于在时间上采样时,做了一个模糊效果
- Rolling shutter:对于高速运动的物体,可能会出现扭曲的现象
- 感光度ISO gain:用ISOxx表示
- 类似于后期处理,对接收到的光乘上某个数
- 可以发生在硬件上,也可以发生在软件上
- ISO越大,越亮,但是噪声也越大
19.1.2.4 高速/低速摄影
高速摄影
- 即每秒钟要拍更多的照片
- 快门时间变短,同时需要更大的光圈
低速摄影/延迟摄影
- 即每秒钟要拍更少的照片
- 快门时间变长,就是需要运动模糊
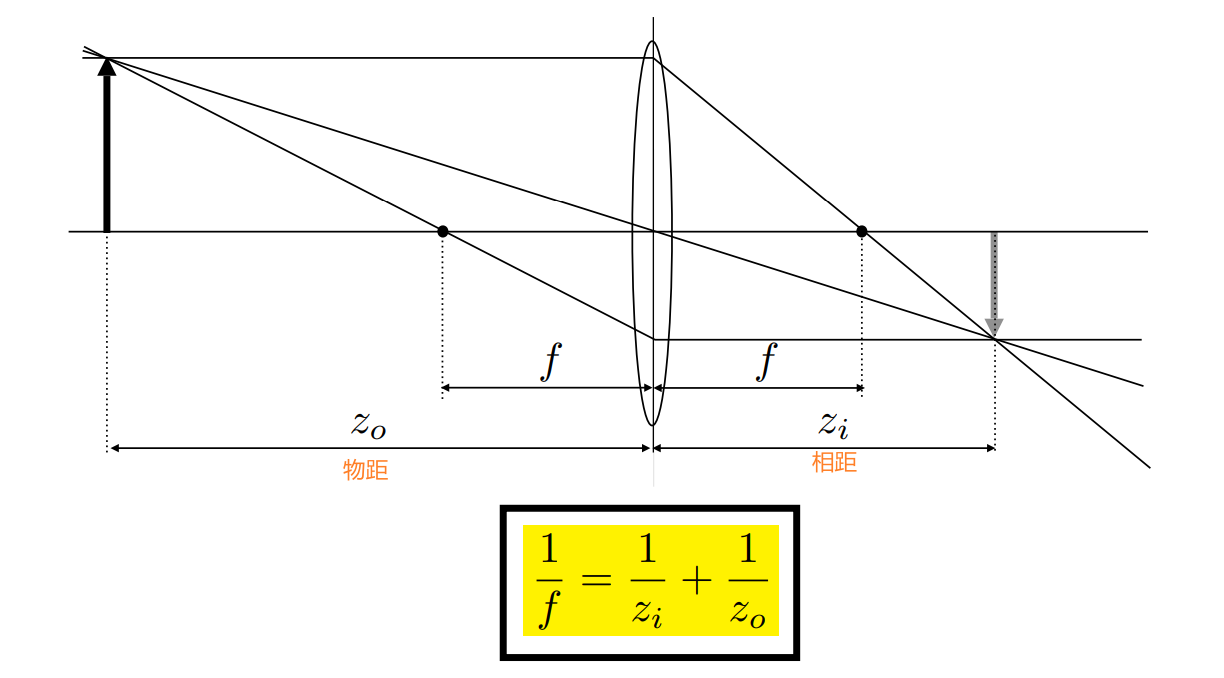
19.2 薄透镜近似
19.2.1 理想化薄透镜
- 平行光可以汇聚到焦点上,过交点可以发散为平行光
- 过中心不改变光路
- 可以任意更改焦距:通过透镜组,动态改变焦距
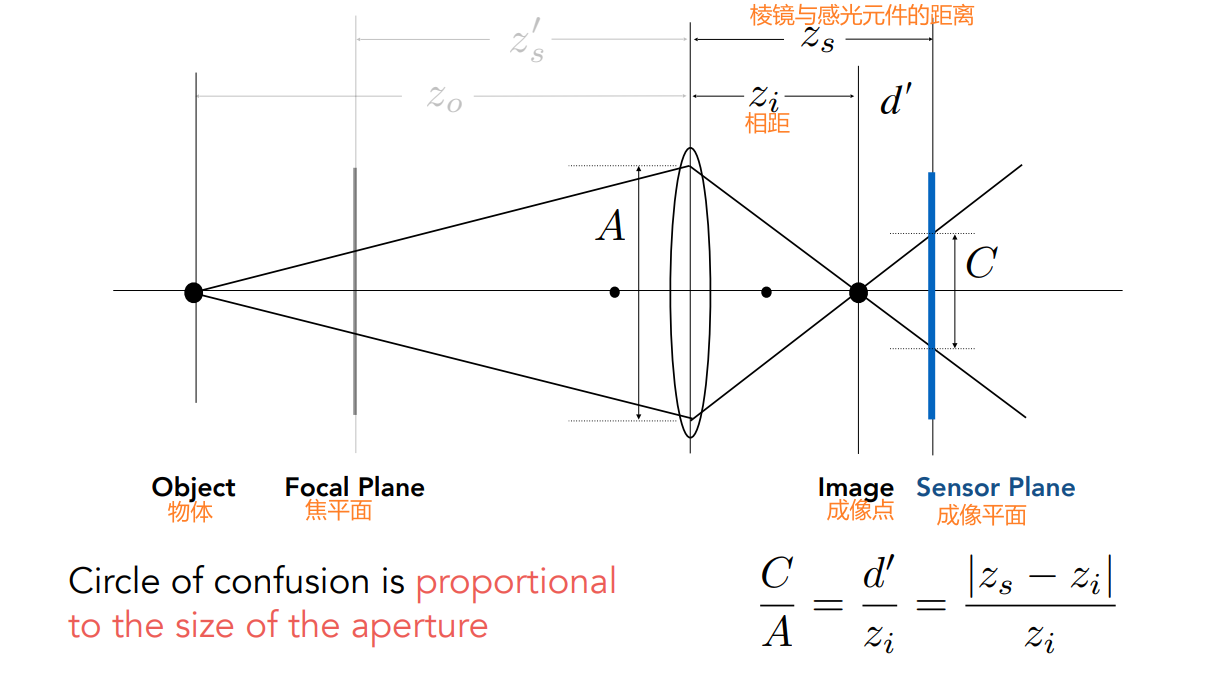
19.2.2 焦散模糊 Defocus Blur
CoC:Circle of Confusion
- 当感光器在成像点后面时,会导致成像为一个圆
- 光圈越大,CoC越大
19.2.3 F-Number的定义
- F-Number = 焦距 / 光圈直径
- 拍的更清楚 => 使用小光圈
19.3 光线追踪模拟薄透镜
19.3.1 定义
- 感光器的大小
- 焦距、光圈大小
- 物体与棱镜的距离,即物距zo
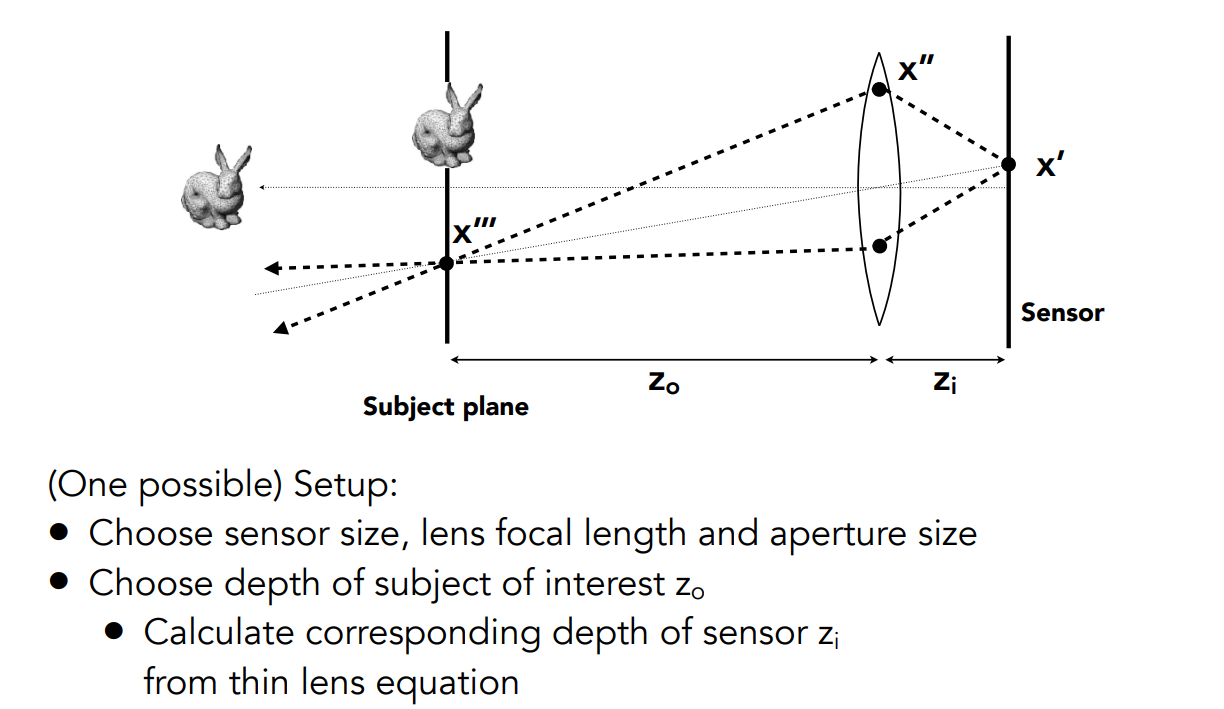
19.3.2 渲染方式
- 在感光元件上选一个点x'
- 在透镜上选另一个点x''
- 连接x'和x'',可以得到通过该透镜后的光线x''→x'''
- 考虑x''→x'''的Radiance,记录到x'上即可
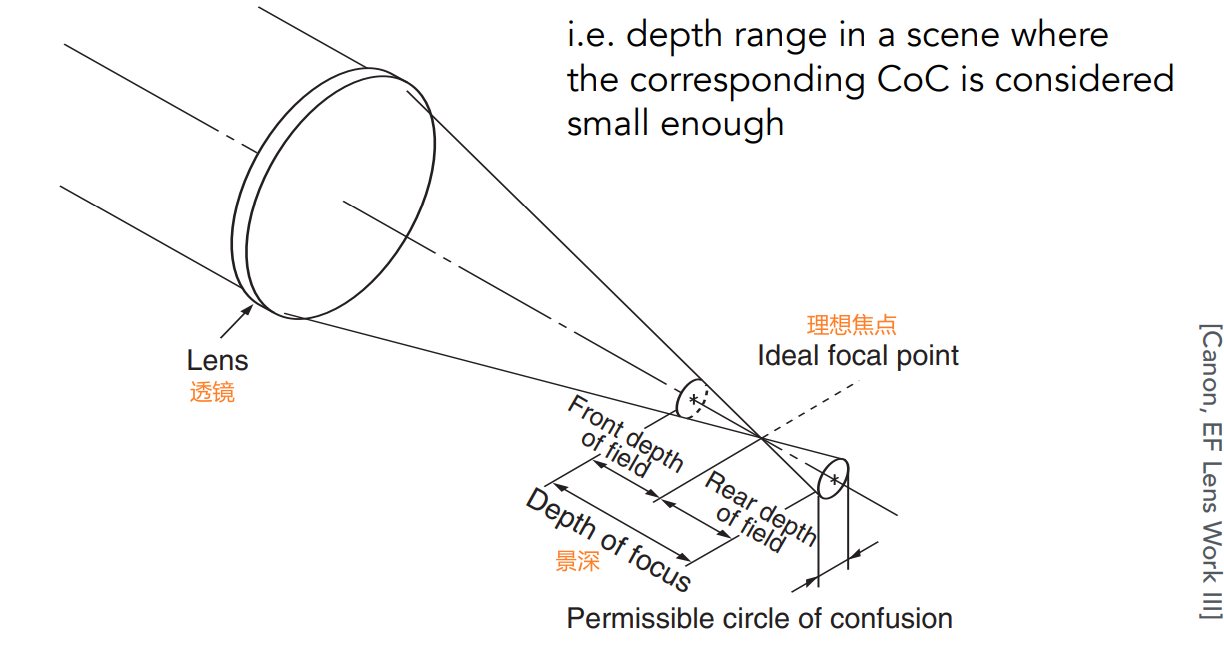
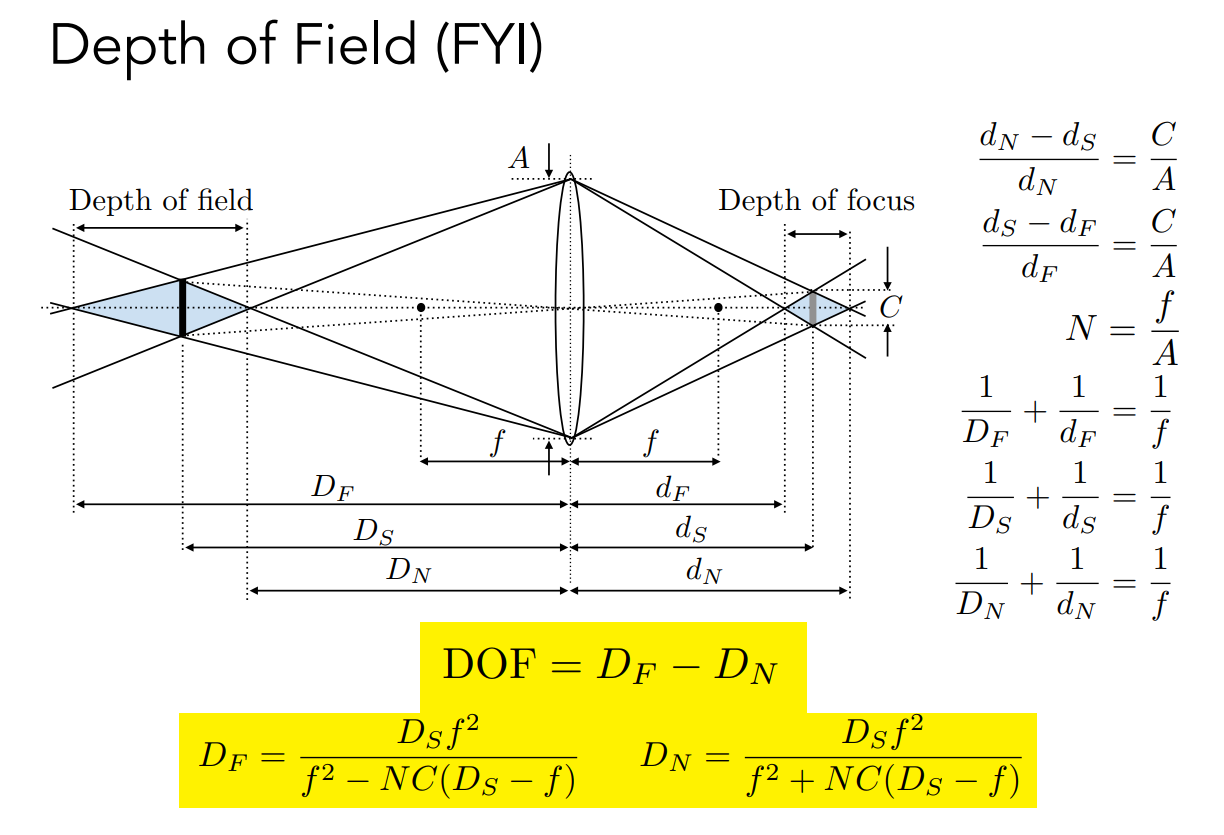
19.4 景深 Depth of Field:DF ~ DN
- 用不同的光圈,会影响模糊的范围
- 在实际场景中有一段深度(景深),这段通过透镜,会在成像区域附近形成一个区域,我们认为这个区域内的CoC都是足够小的
- 这段深度内的像素,认为均是锐利的,即不模糊的
19.5 光场 Light Field / Lumigraph
19.5.1 全光函数 Plenoptic Function
19.5.1.1 Grayscale snapshot:P(θ, Φ)
- 定义了在一个固定地方,向任意一个方向(θ, Φ)看,能够看到的亮度值
19.5.1.2 Color snapshot:P(θ, Φ, λ)
- 定义了在一个固定地方,向任意一个方向(θ, Φ)看,能够看到的波长为λ的亮度值
19.5.1.3 Movie:P(θ, Φ, λ, t)
- 定义了在一个固定地方,在某个时间t,向任意一个方向(θ, Φ)看,能够看到的波长为λ的亮度值
- 即电影
19.5.1.4 Holographic Movie:P(θ, Φ, λ, t, VX, VY, VZ)
- 定义了在某个位置(VX, VY, VZ),在某个时间t,向任意一个方向(θ, Φ)看,能够看到的波长为λ的亮度值
- 即全息电影
19.5.1.5 Plenoptic Function:P(θ, Φ, λ, t, VX, VY, VZ)
- 在任何时间t、任何地点V、向任何方向(θ, Φ)看,所能看到的所有的光λ
- 是一个七维函数
19.5.2 光线的定义
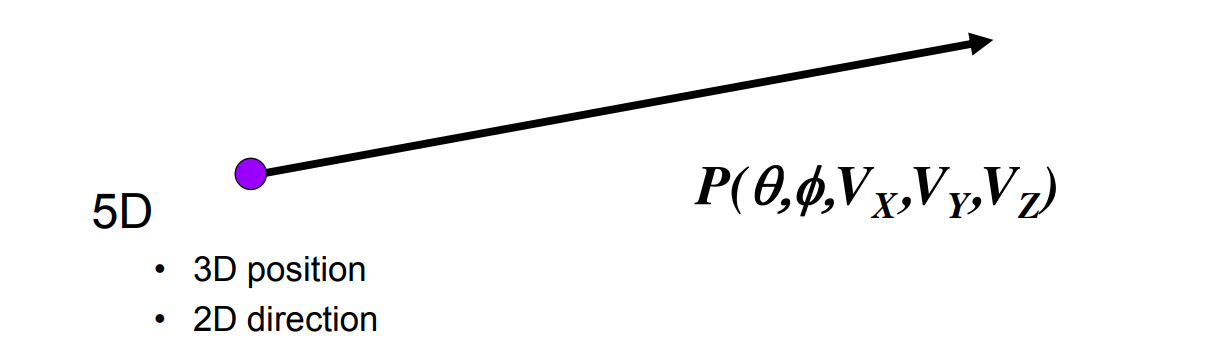
5个维度:P(θ, Φ, VX, VY, VZ)
- 3个维度的坐标
- 2个维度的方向
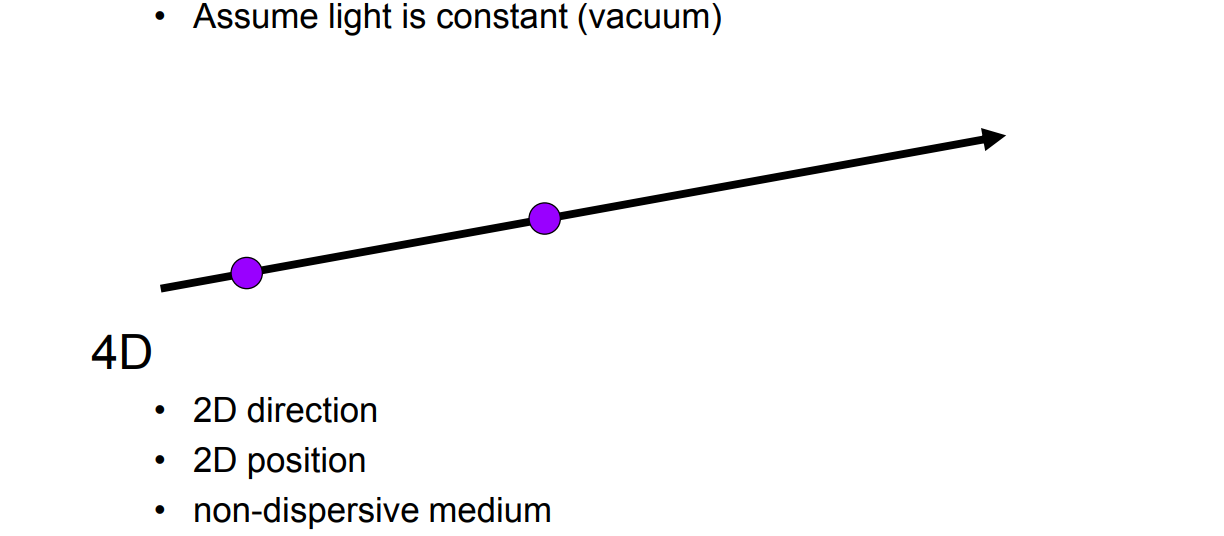
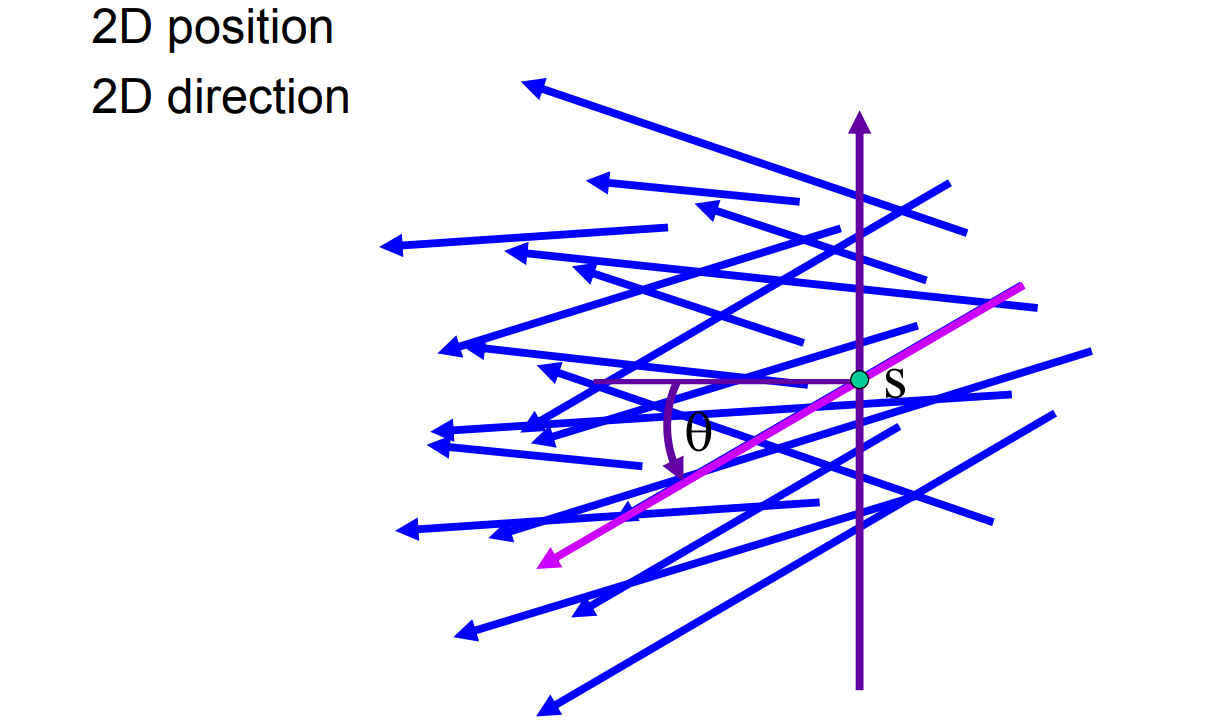
4个维度:
- 2维的位置:(u, v)
- 2维的方向:(θ, Φ)
19.5.3 全光表面 Plenoptic Surface
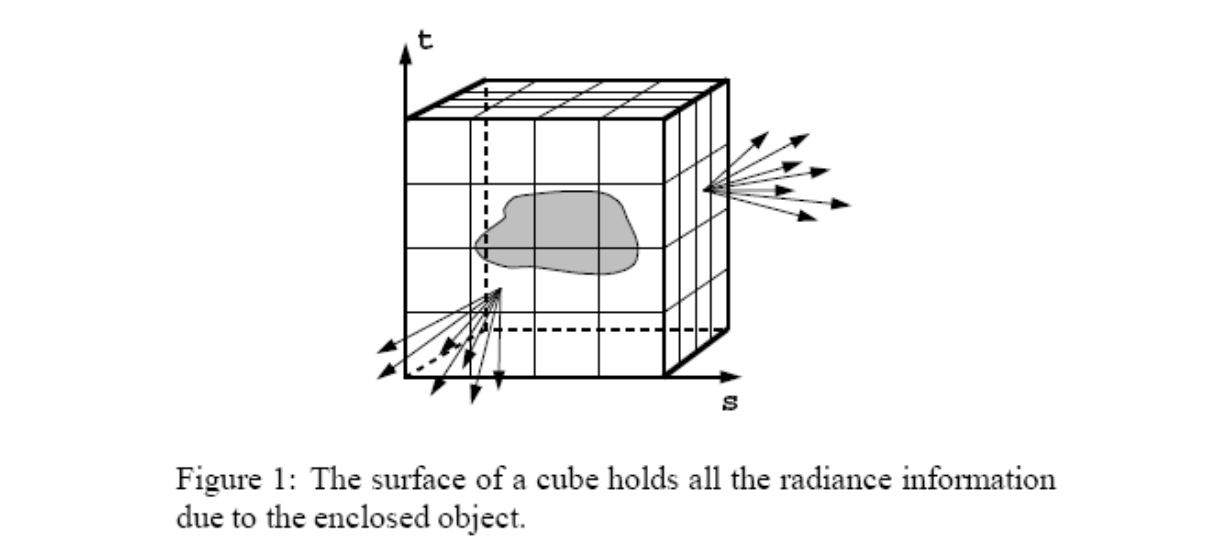
光场:任何一个位置,往任何一个方向去的光的强度
- 在表面的位置:(u, v)
- 方向:(θ, Φ)
- 从任意一个位置,往任意一个方向看,都看到该光场的强度
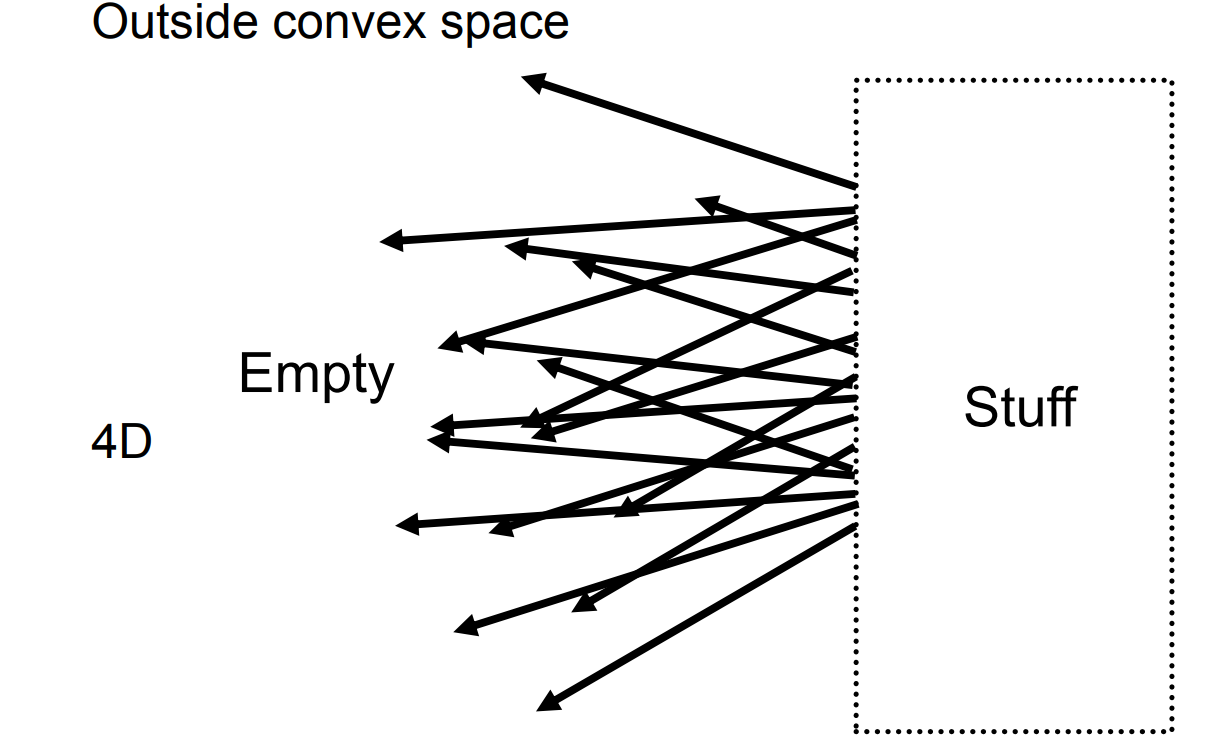
19.5.4 光场
不需要直到物体具体是什么,只需要直到包围盒外的光场信息
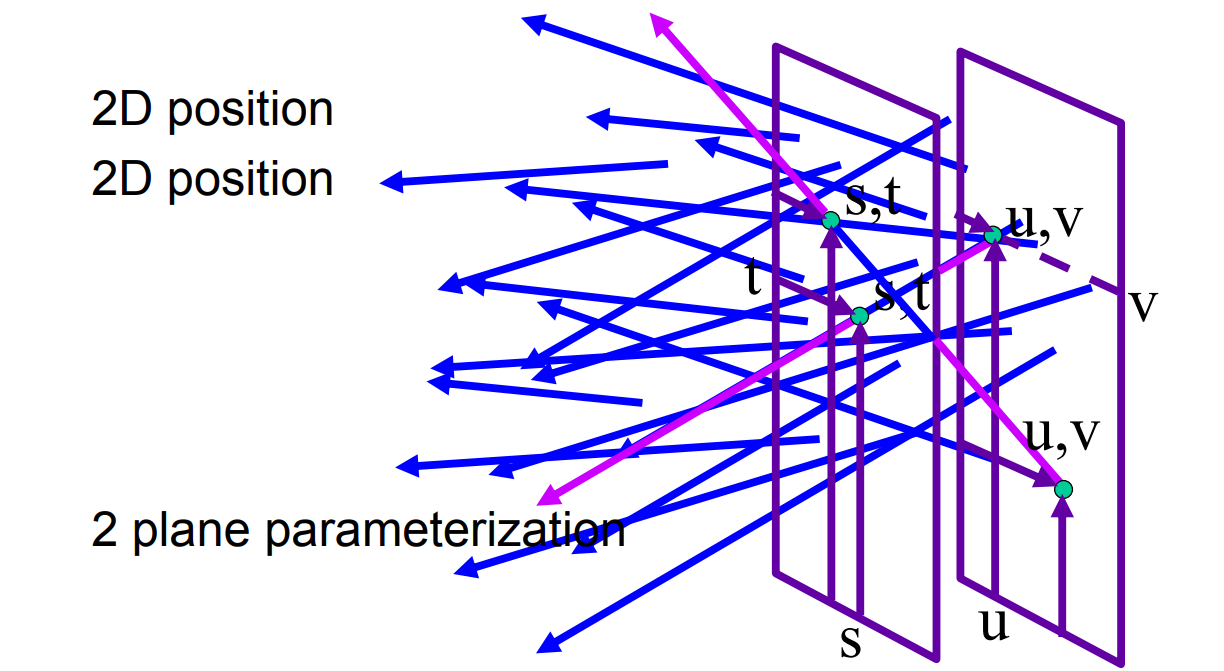
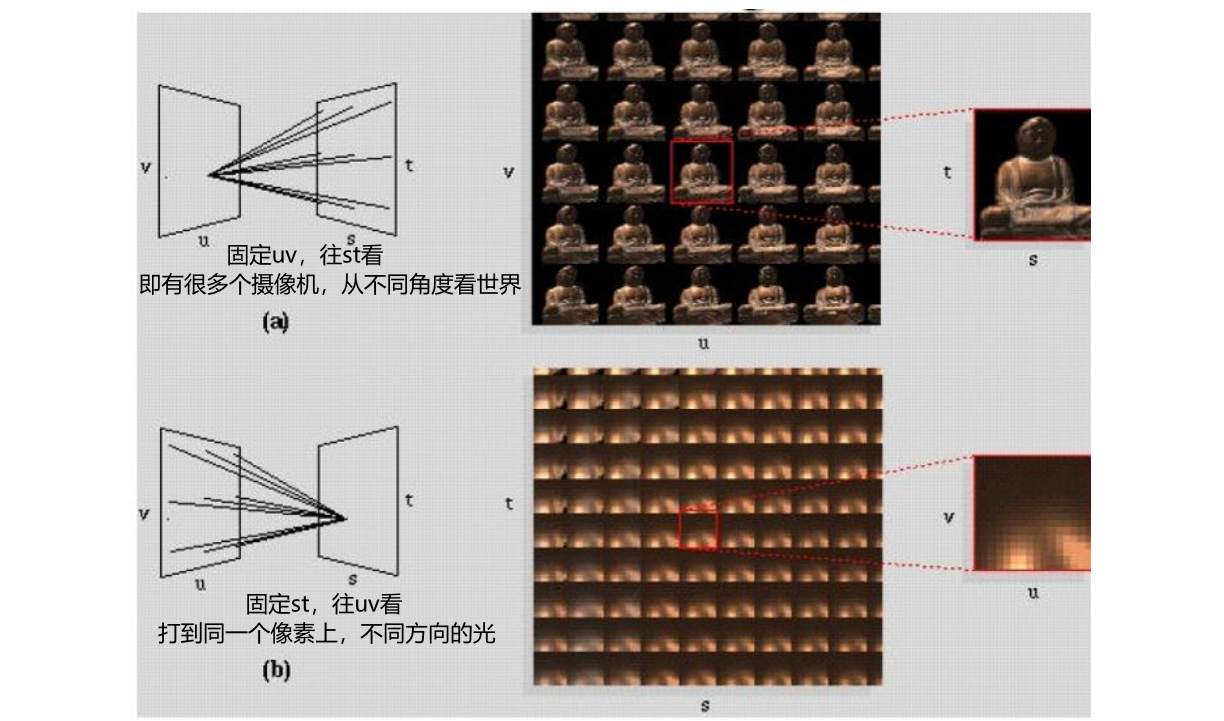
19.5.5 Lumigraph-Organization
取一个平面,只需要直到该平面上任何一个位置,往任何一个方向去的光的强度
也可以定义两个平面(u,v) & (s,t),定义该光线
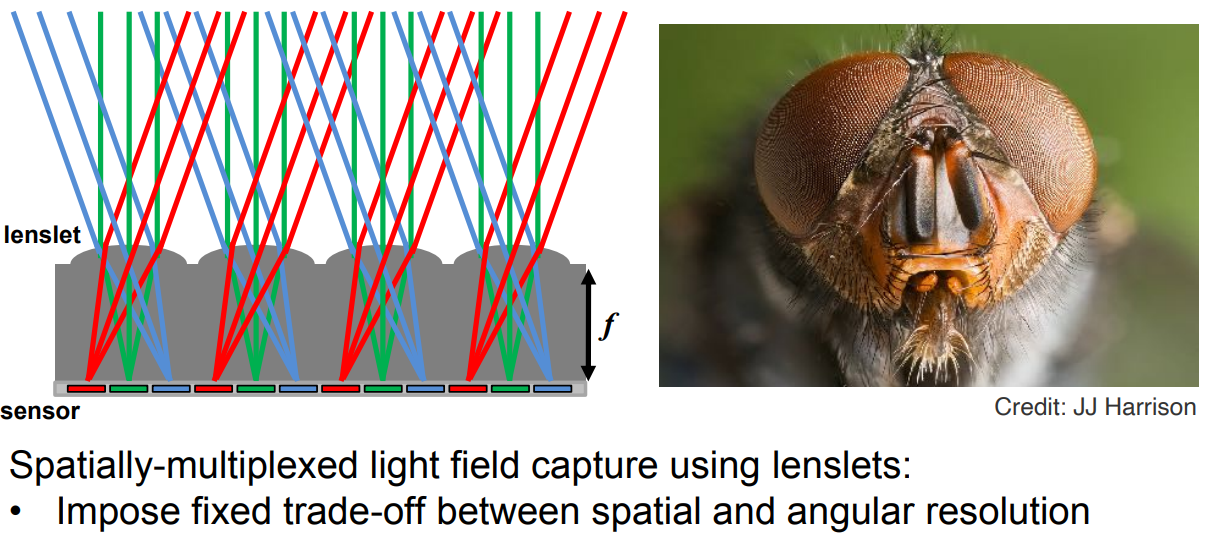
19.5.6 光场摄像机
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 华风夏韵!
评论