GAMES104-11:物理:高级应用
十一、物理:高级应用
11.1 角色控制器
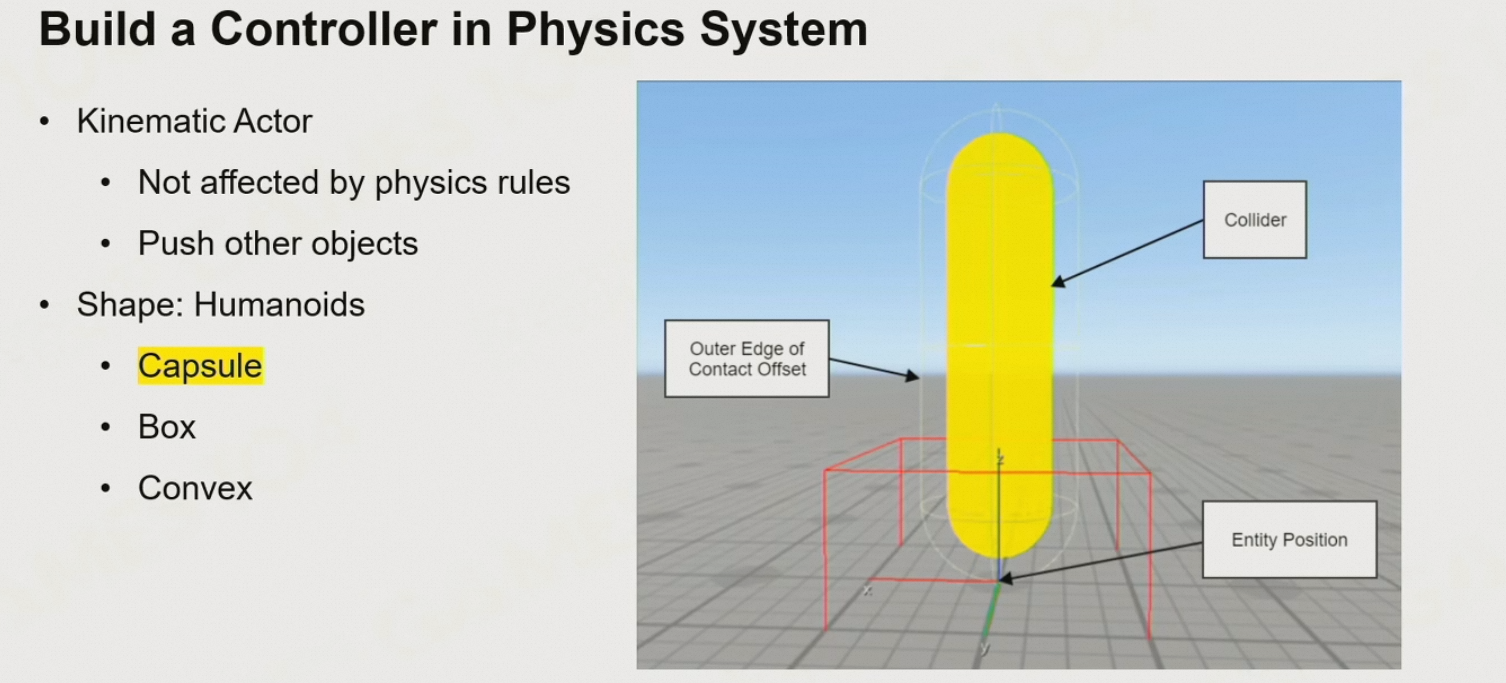
角色控制器是 Kinematic Actor,是反物理的
11.1.1 在物理系统中创建一个Controller
两个胶囊体:
- 内部的胶囊体:用于与其他物体进行碰撞
- 外部的胶囊体:防止高速移动时卡到其他物体里面、防止角色离墙太近导致相机出现bug
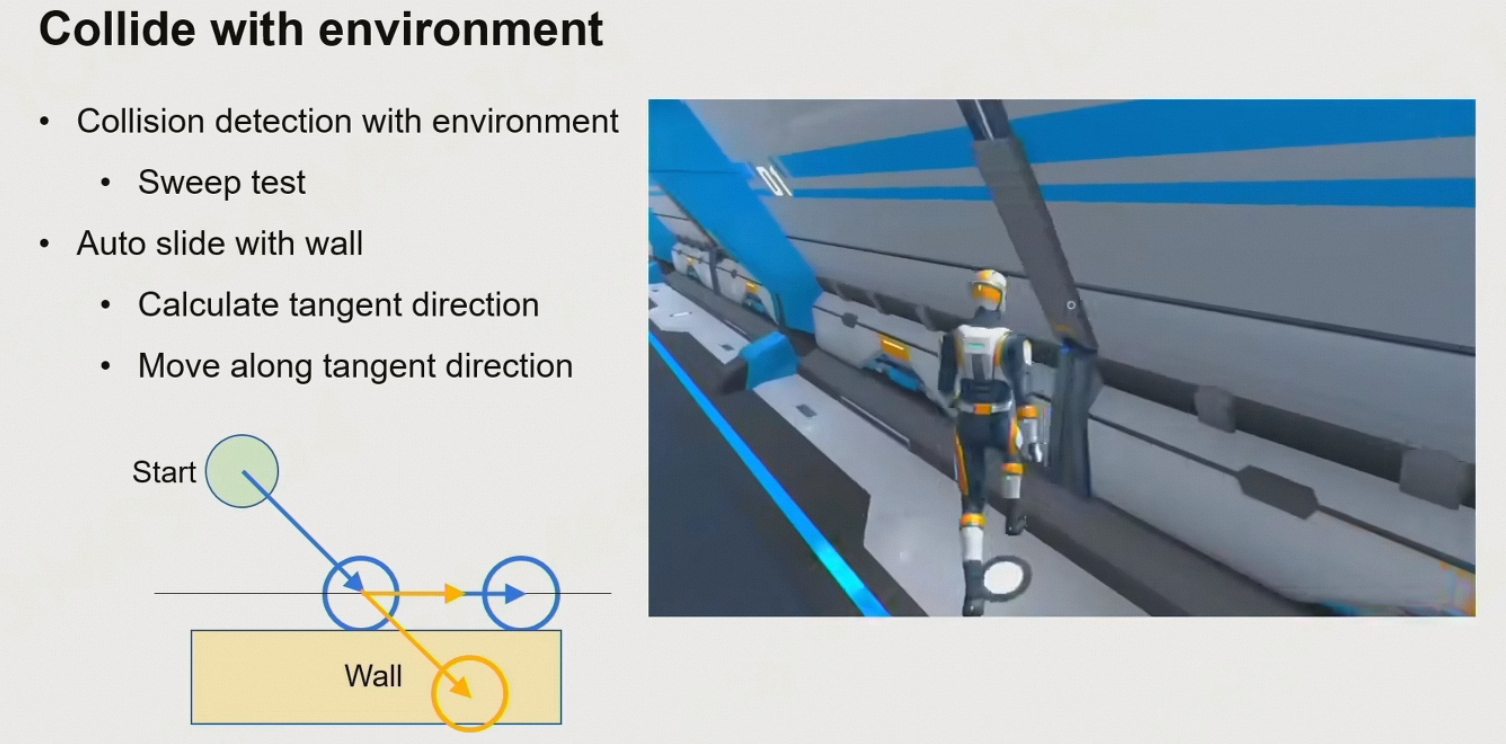
11.1.2 与环境的碰撞
- 撞墙时不是直接停住,而是会沿墙滑动
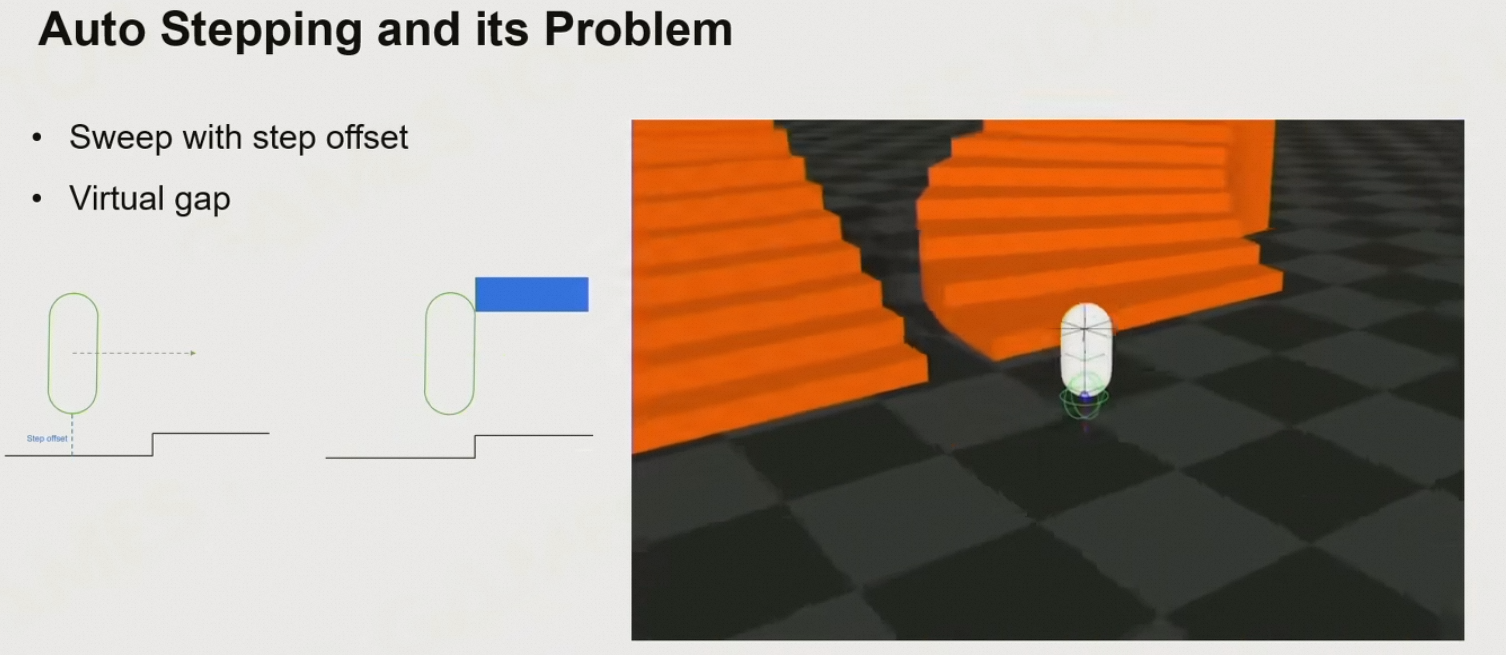
11.1.3 自动的stepping
有小台阶时,角色要能够迈上去
- 每一帧会尝试将controller往高抬一点,往前走
- 问题:如果屋顶不是很高,这样做会导致角色卡到屋顶里面
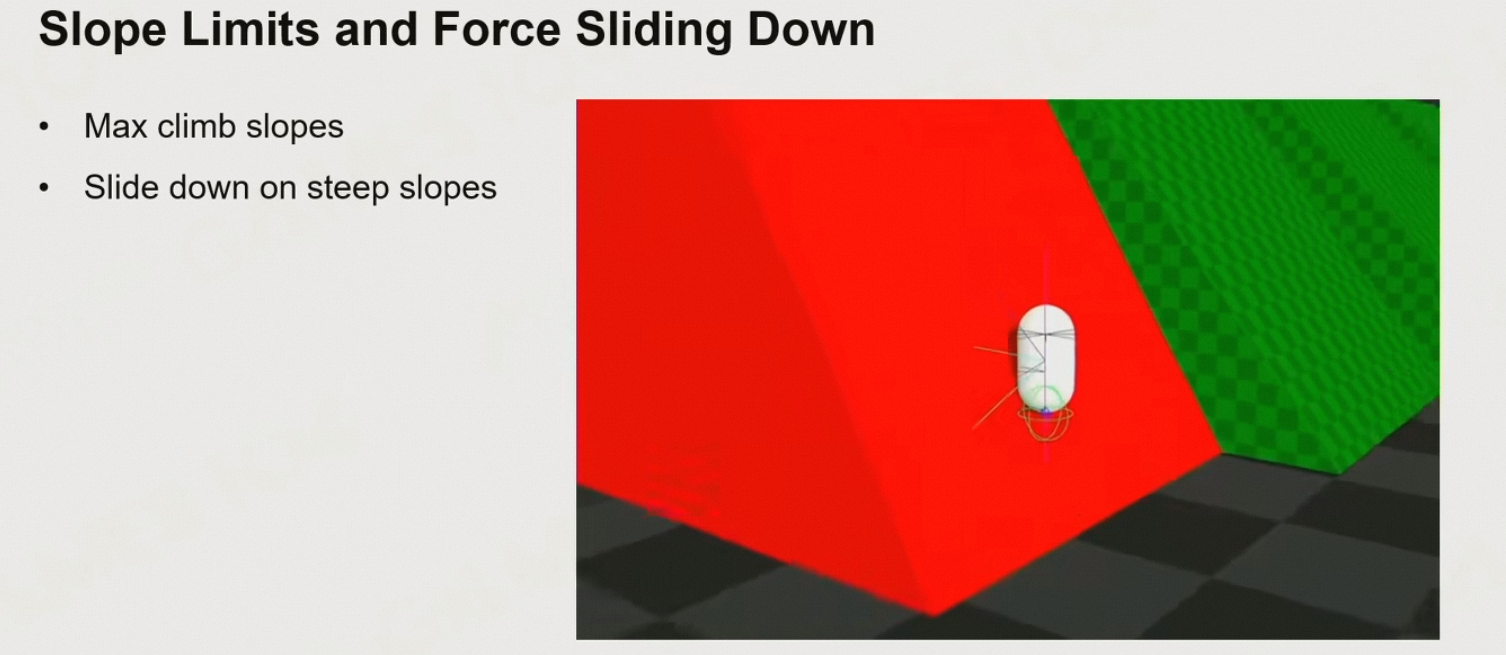
11.1.4 最大斜坡角度
当斜坡的角度过大时,角色虽然能上去,但是会滑下来
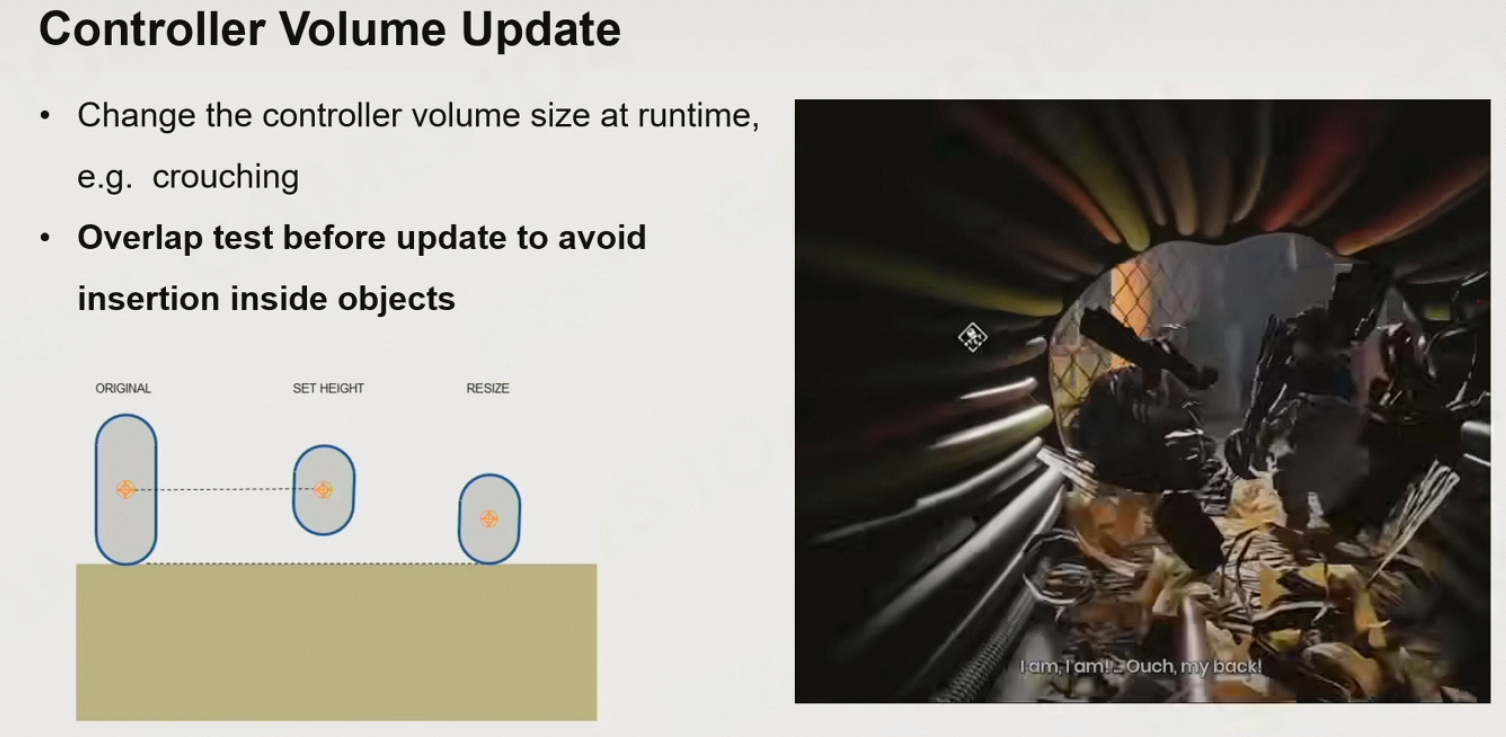
11.1.5 体积更新
当角色的姿态变换时,controller的形状要发生变化
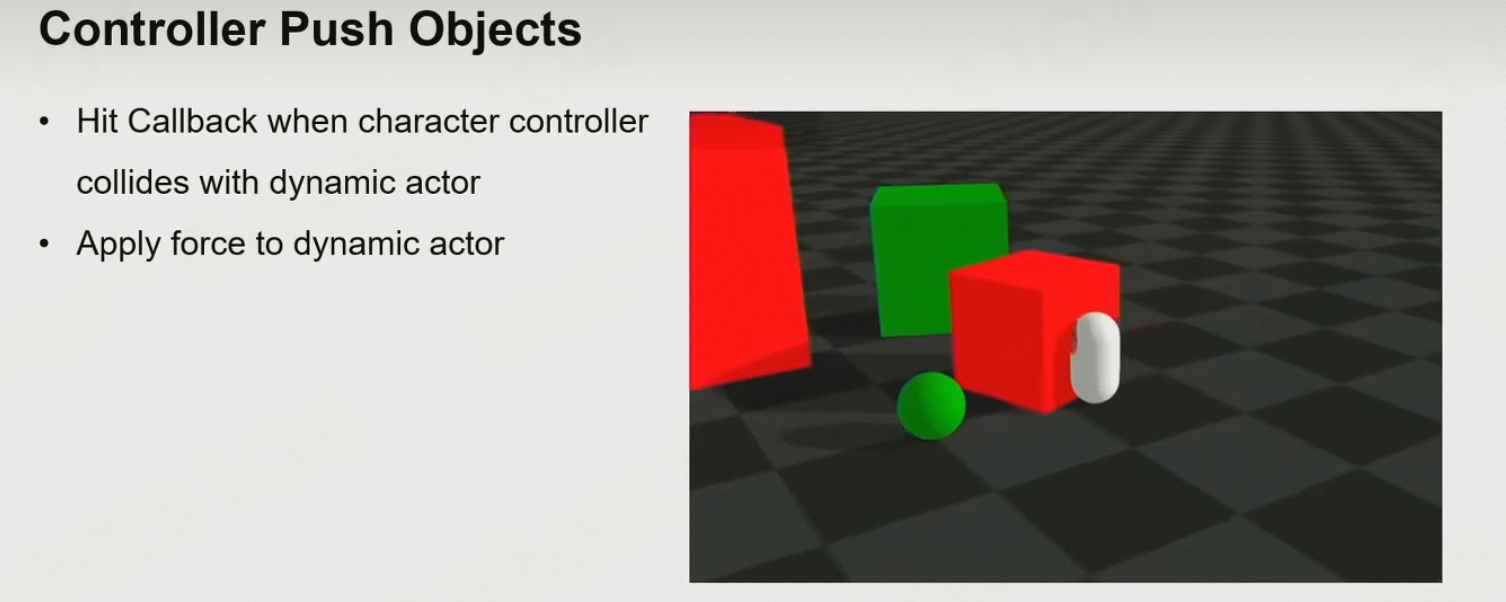
11.1.6 Controller推动物体
当controller撞击到物体上时,会触发物理引擎的回调函数,根据controller的质量&速度,输出一个冲量
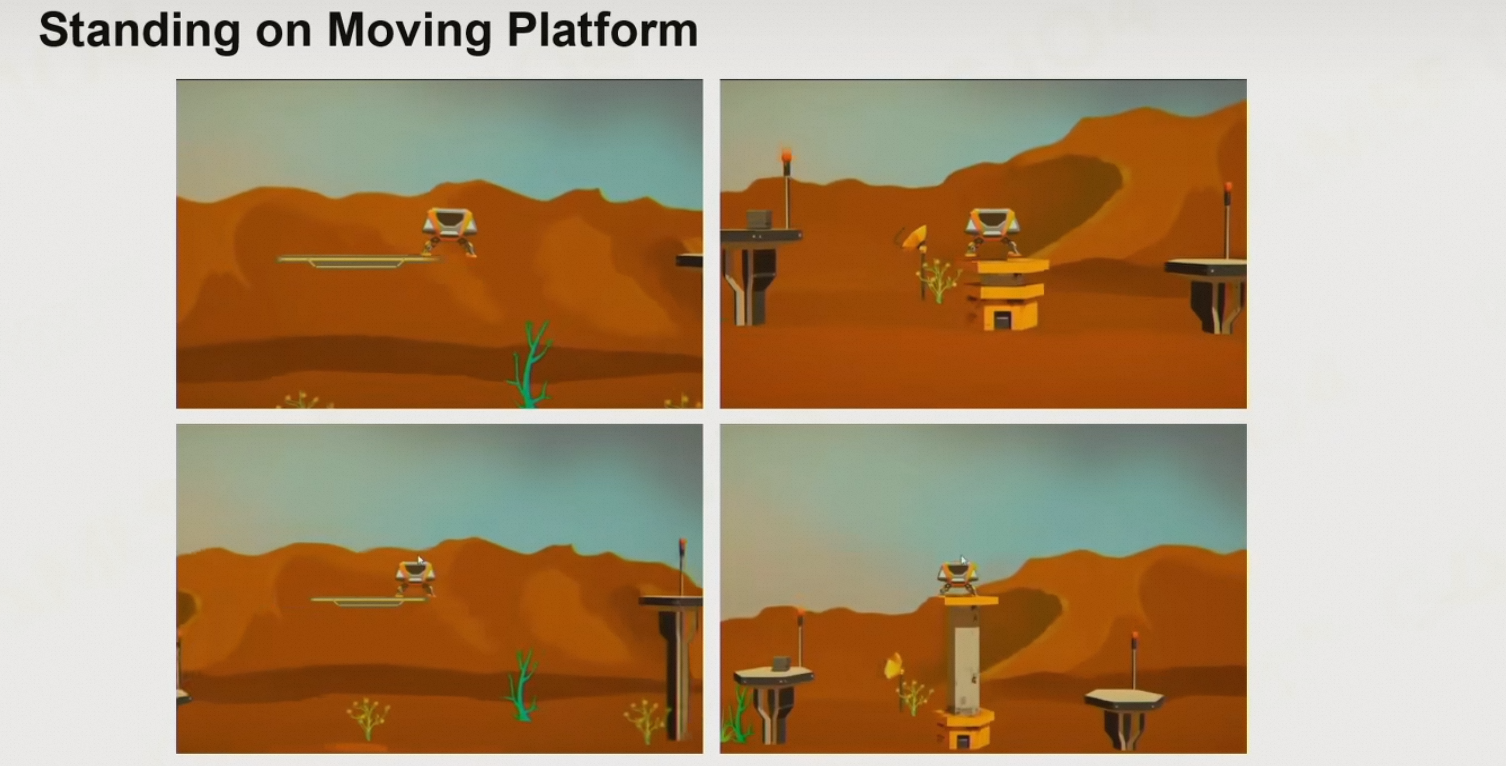
11.1.7 站在平台上
会通过ray cast,判断controller是站在哪个物体上的。在没有新的输入之前,会将controller与物体绑死
11.2 布娃娃系统
11.2.1 将骨骼与刚体绑定
用几个刚体包裹住角色的大骨骼,所有刚体加起来将整个骨骼包裹住
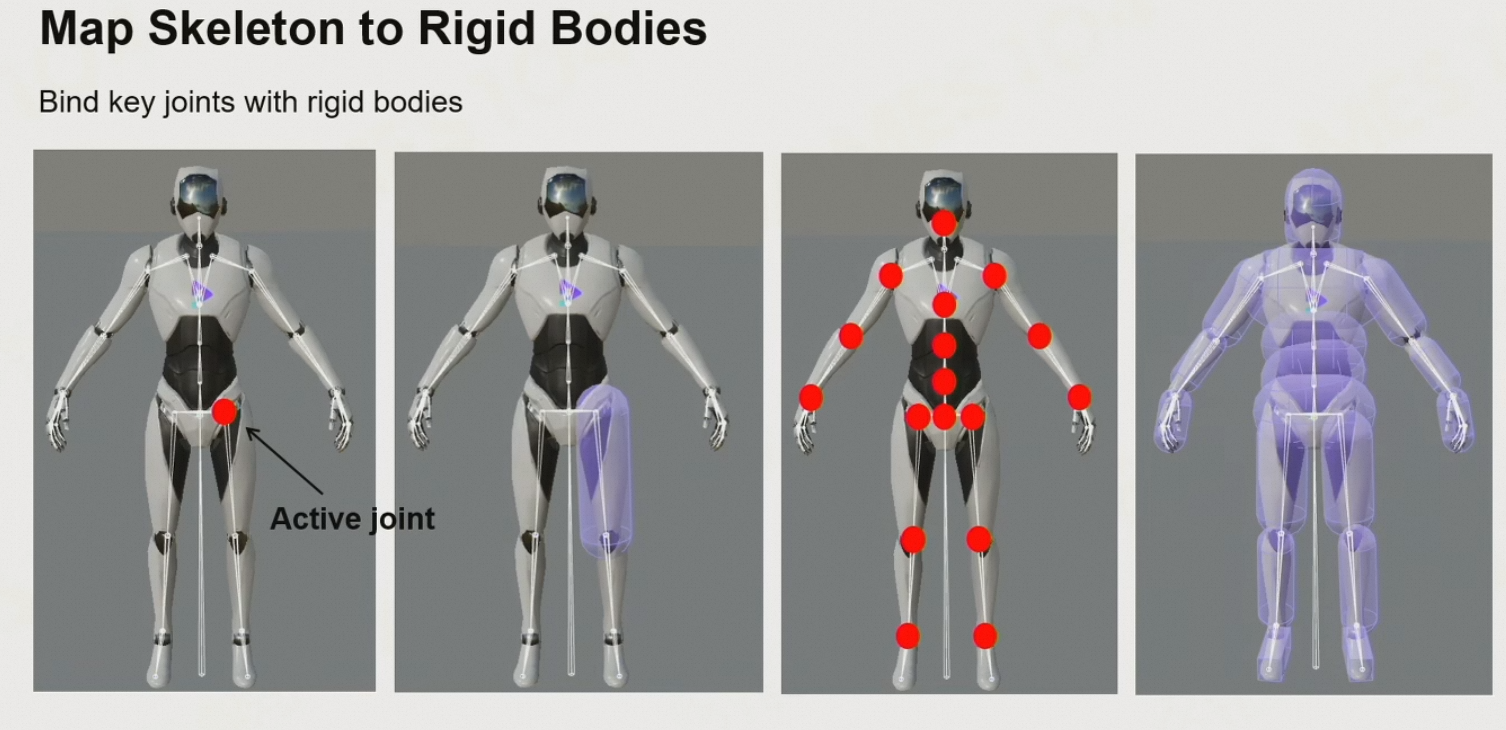
11.2.2 骨骼的约束
通常在引擎中,会开放每个刚体之间的六个自由度的约束

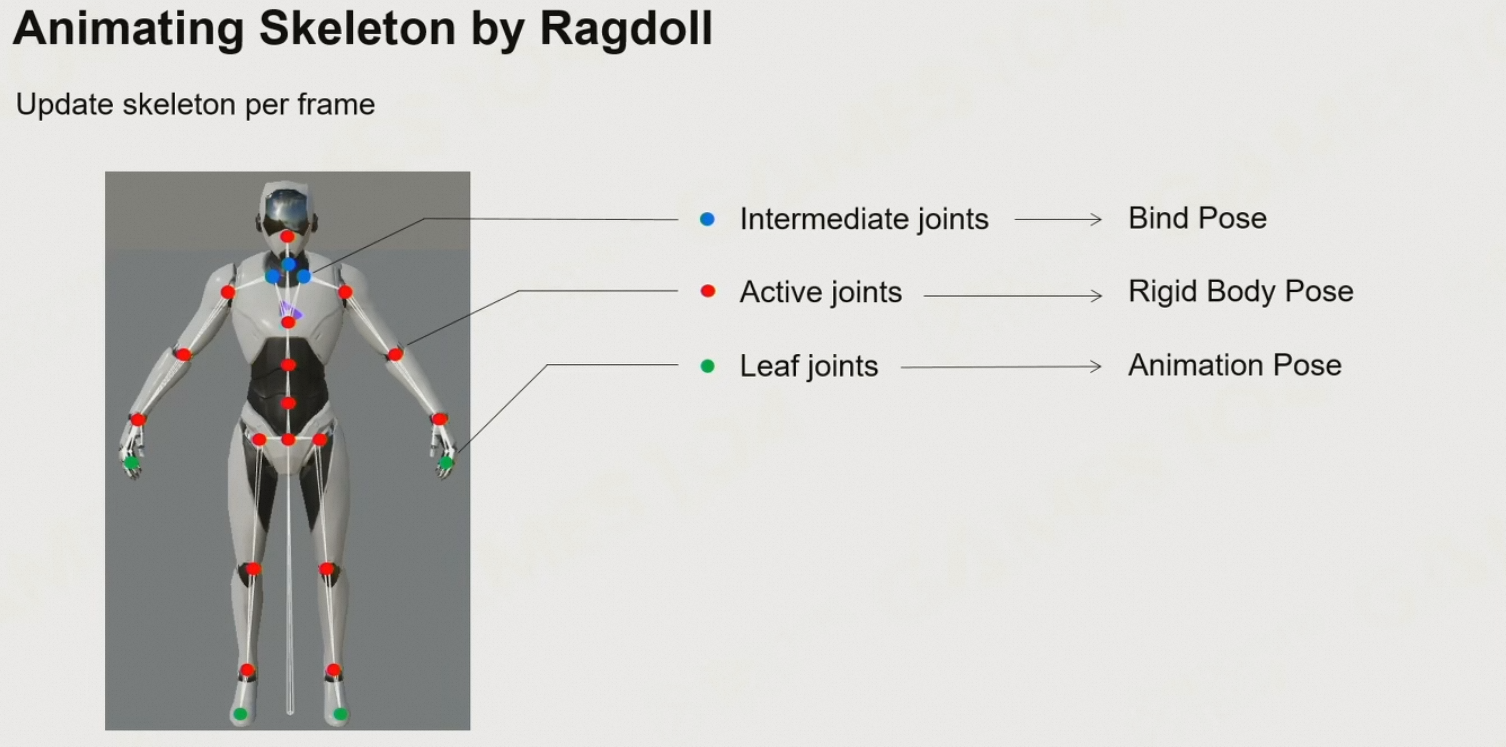
11.2.3 用Ragdoll驱动骨骼运动
类似于动画重定向
- Active joint:Ragdoll绑定的骨骼,直接由Ragdoll控制
- Leaf joint:在Ragdoll之外的骨骼,通常不会改变姿态
- Intermediate joint:在Ragdoll绑定的骨骼之间的骨骼,会通过相邻两个Active joint进行插值计算
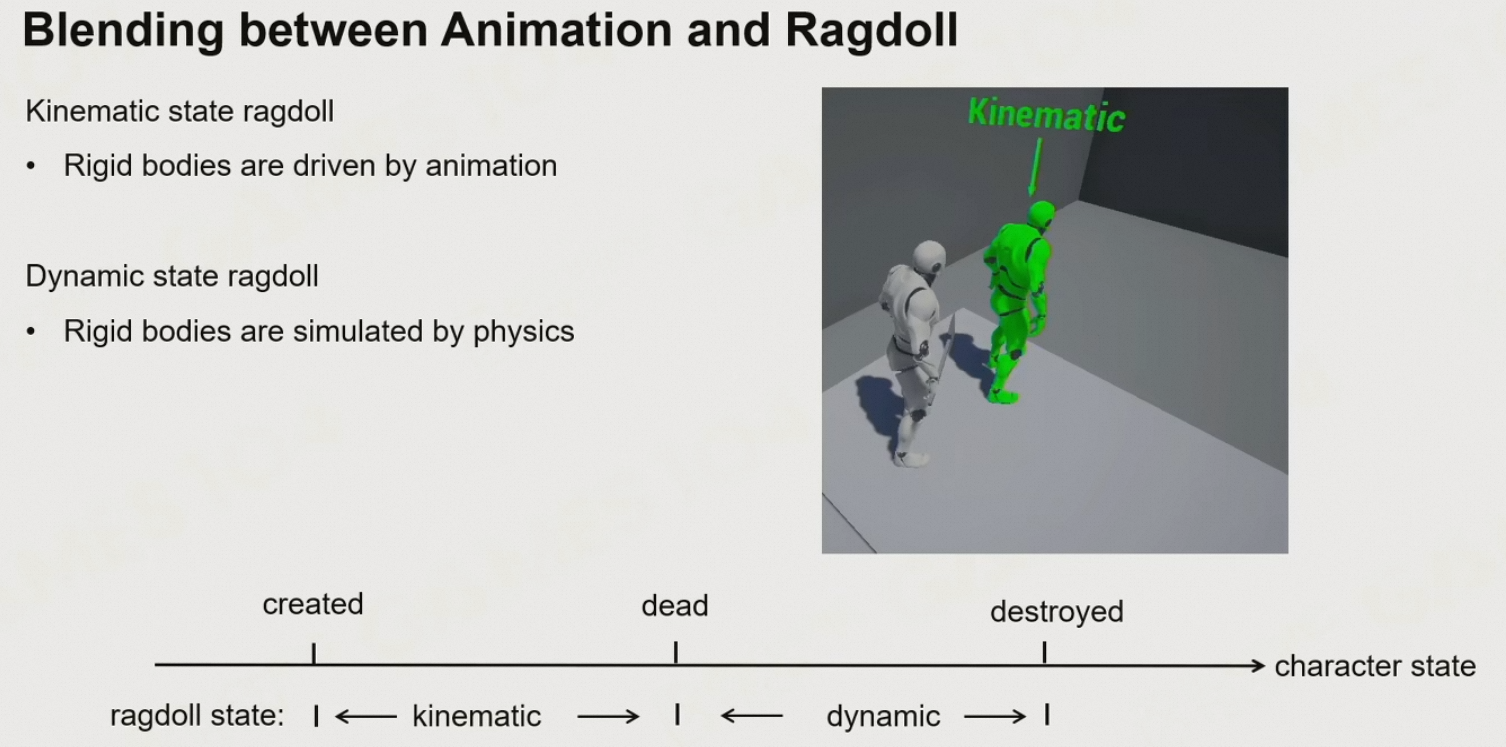
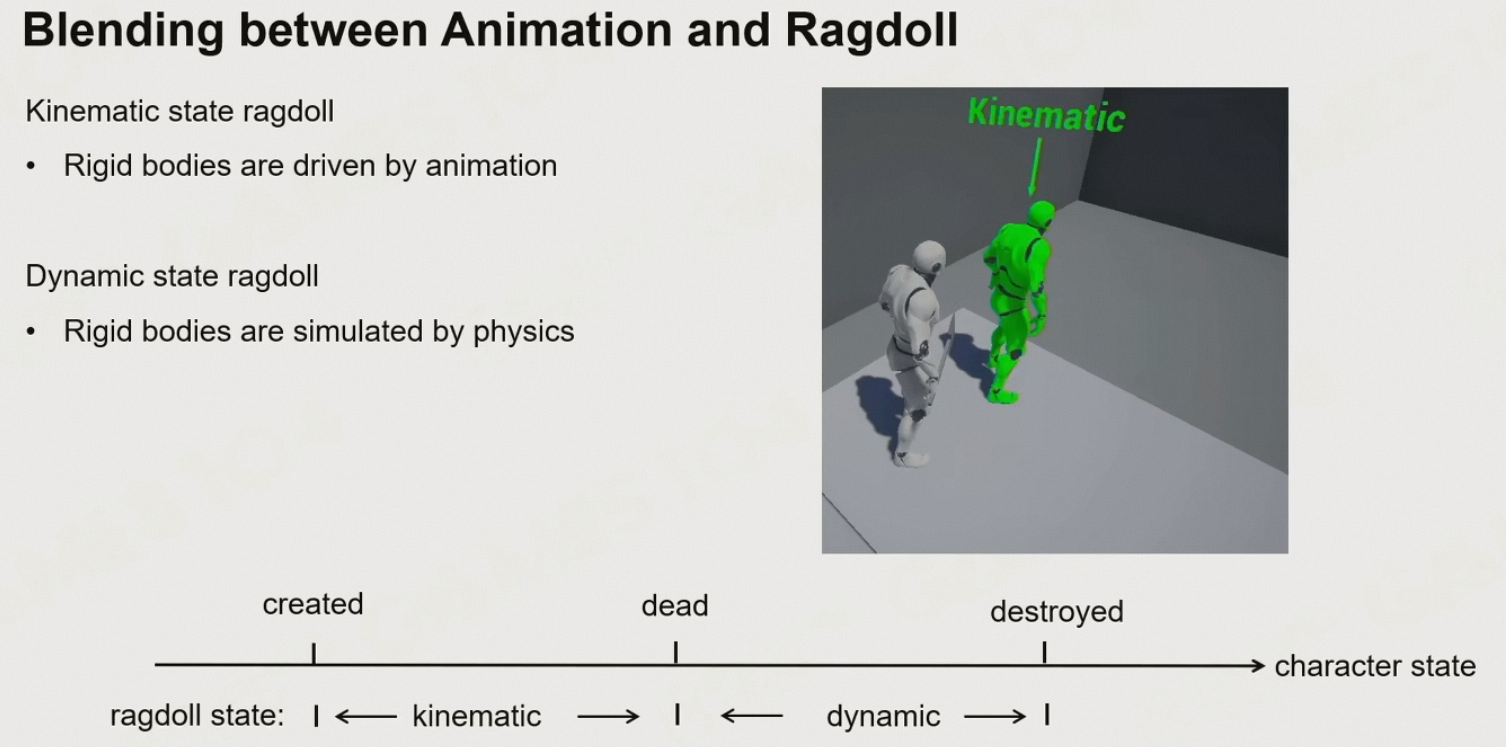
11.2.4 将动画与Ragdoll混合
- 前一部分由动画驱动,后一部分逐步交给Ragdoll驱动
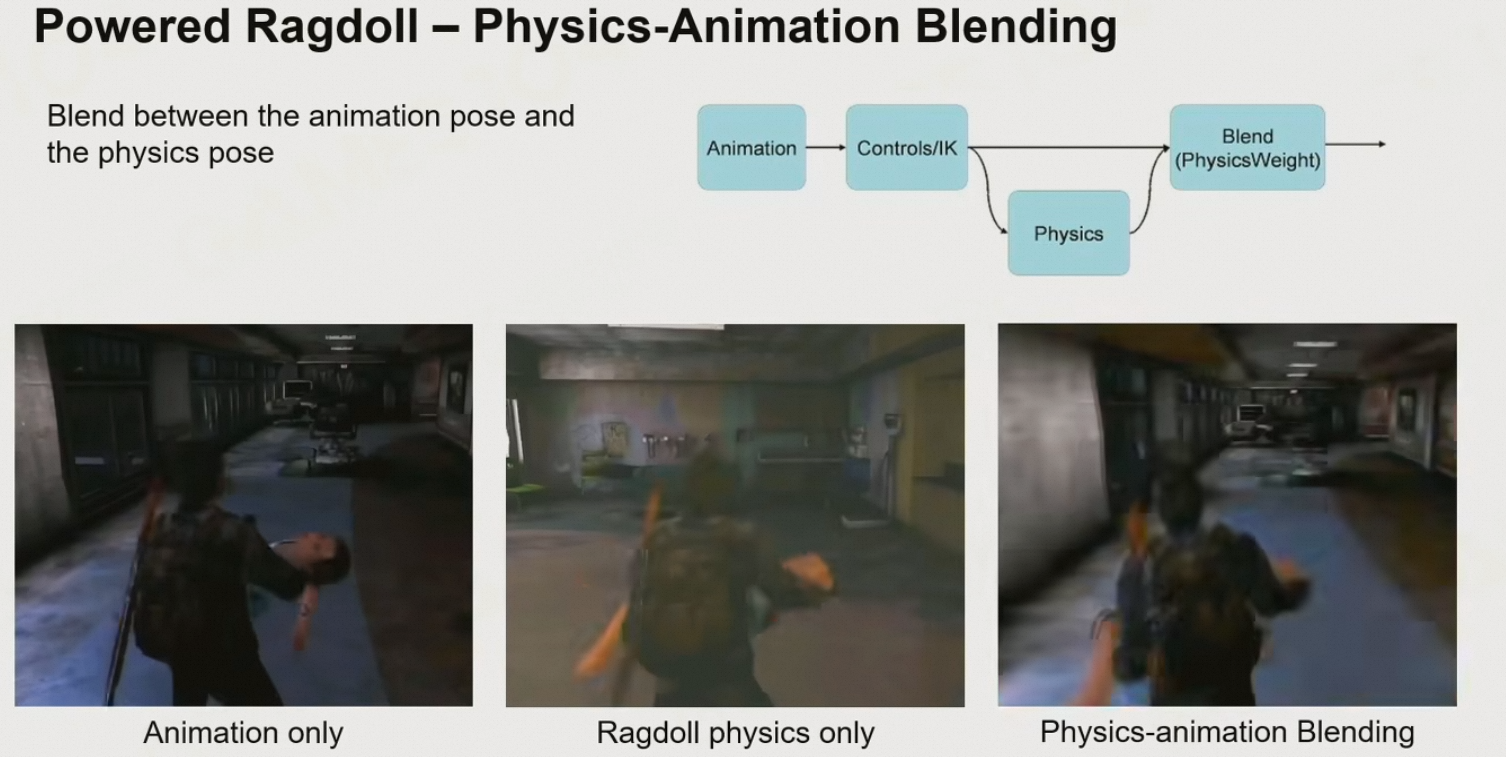
11.2.5 Powered Ragdoll
将动画作为输入,动画中会包含速度与旋转,然后由物理系统产生新的动量&角动量,混合起来
11.3 衣料模拟
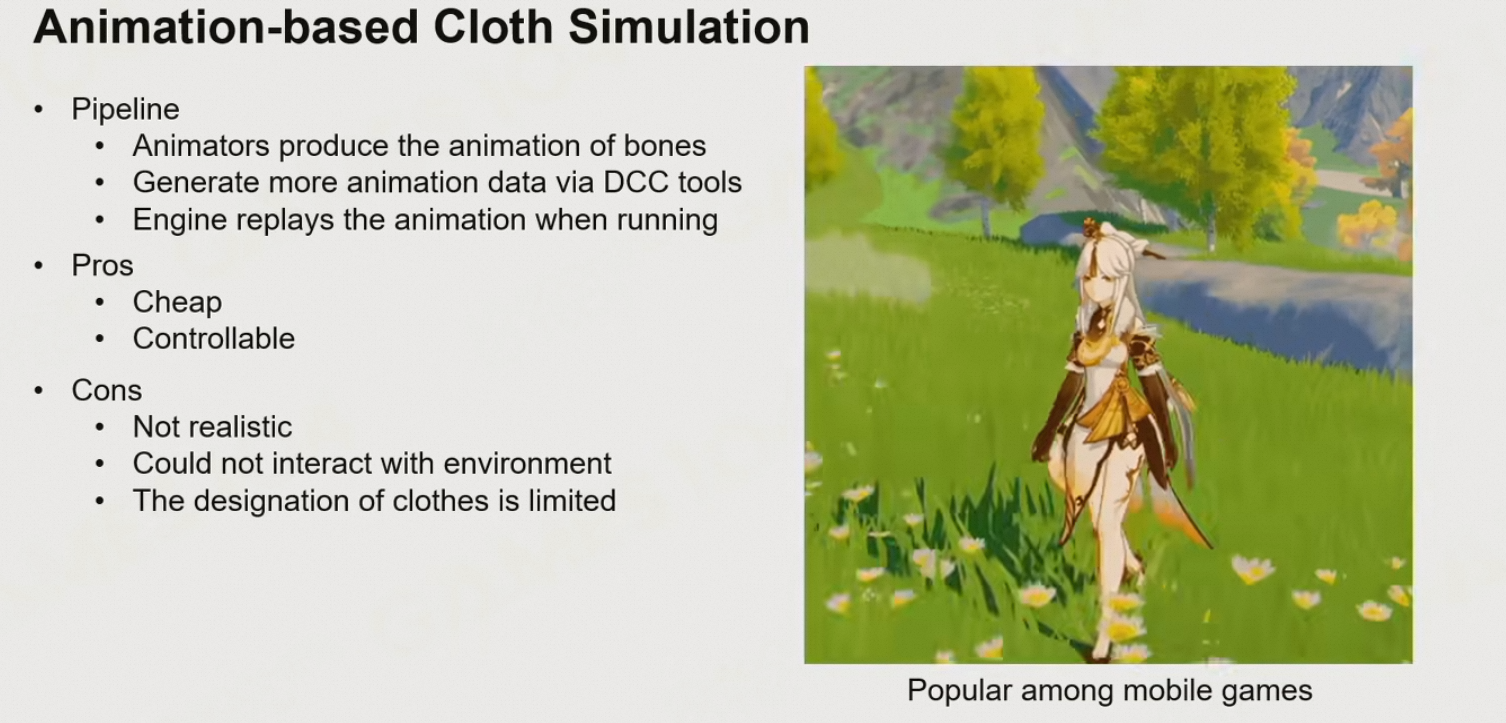
11.3.1 基于动画的衣料模拟
用骨骼驱动衣物
优点:性能高、可控
缺点:不真实、不能与环境交互、衣物的设计很受限
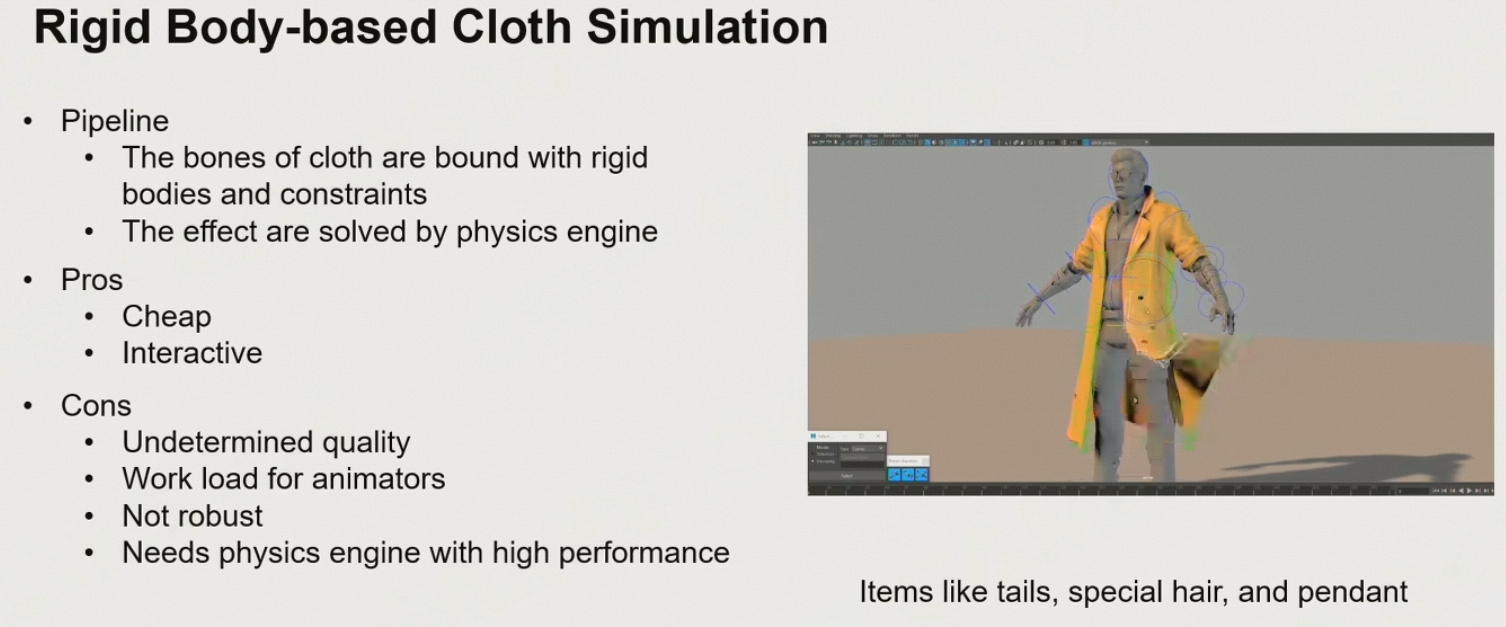
11.3.2 基于刚体的衣料模拟
用ragdoll技术驱动衣物
11.3.3 基于Mesh的衣料模拟
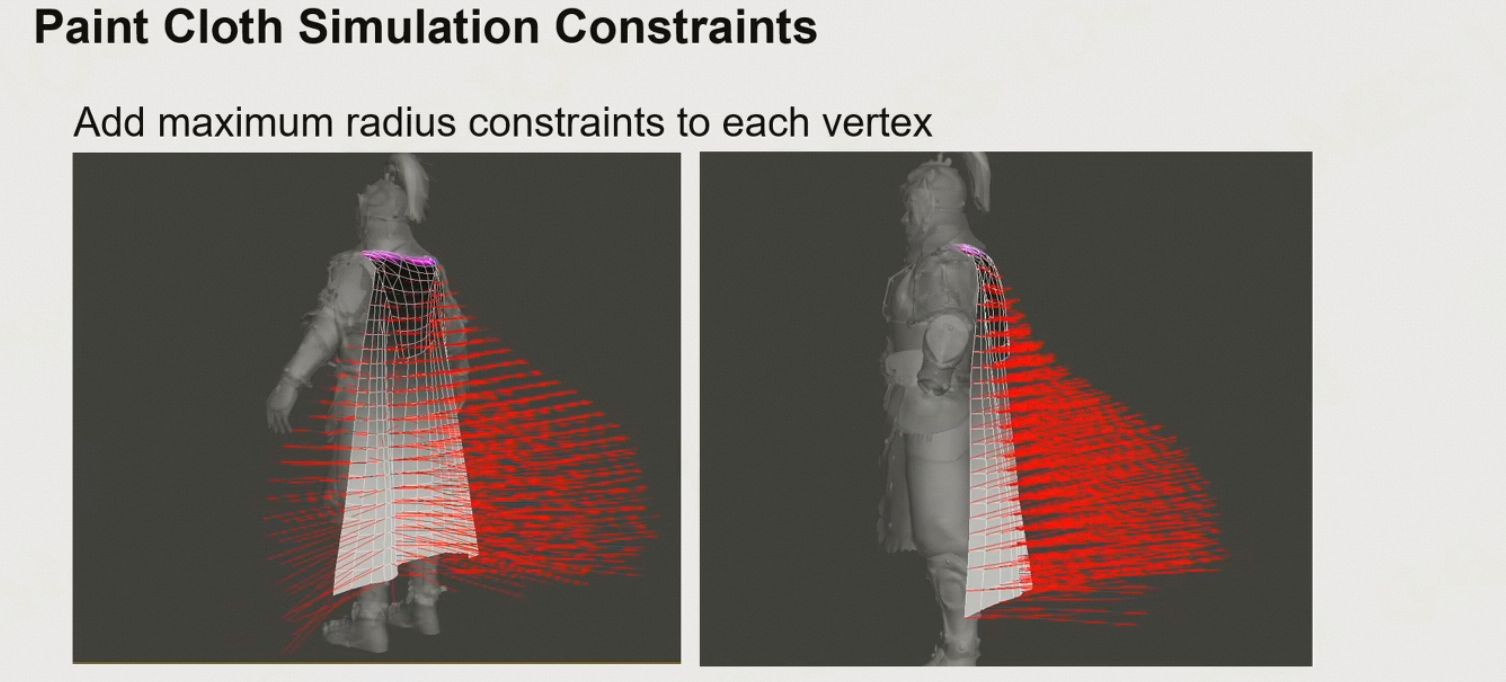
11.3.3.1 前期工作
将render mesh转化为physical mesh,大幅减少面数
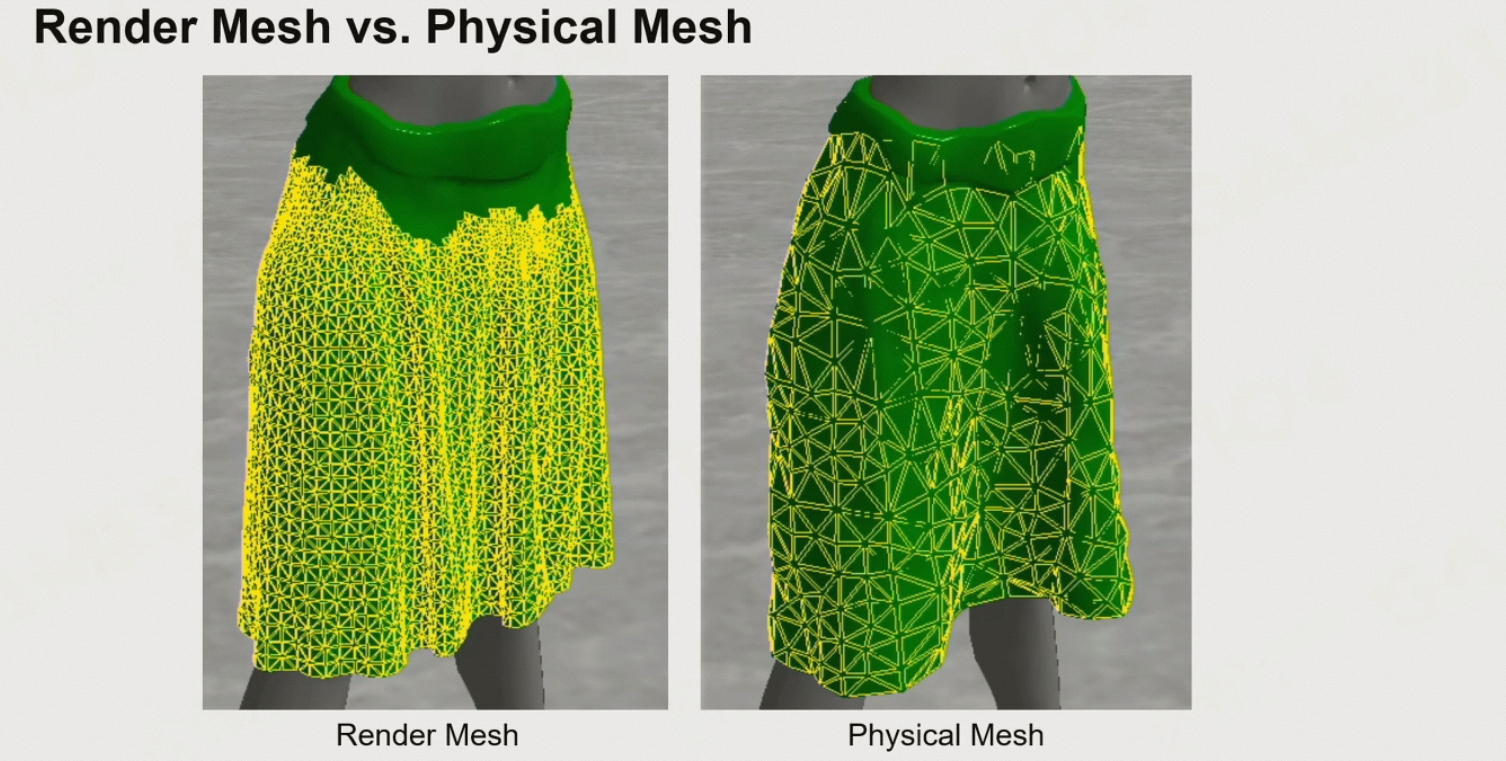
设置每个顶点的约束,越靠近固定点的顶点,约束越大,可变性越小,骨骼权重越小
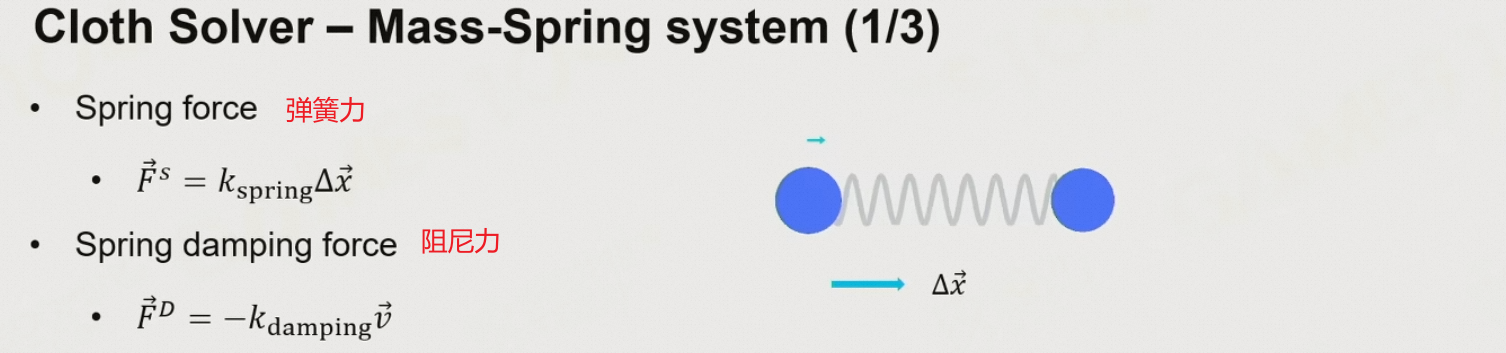
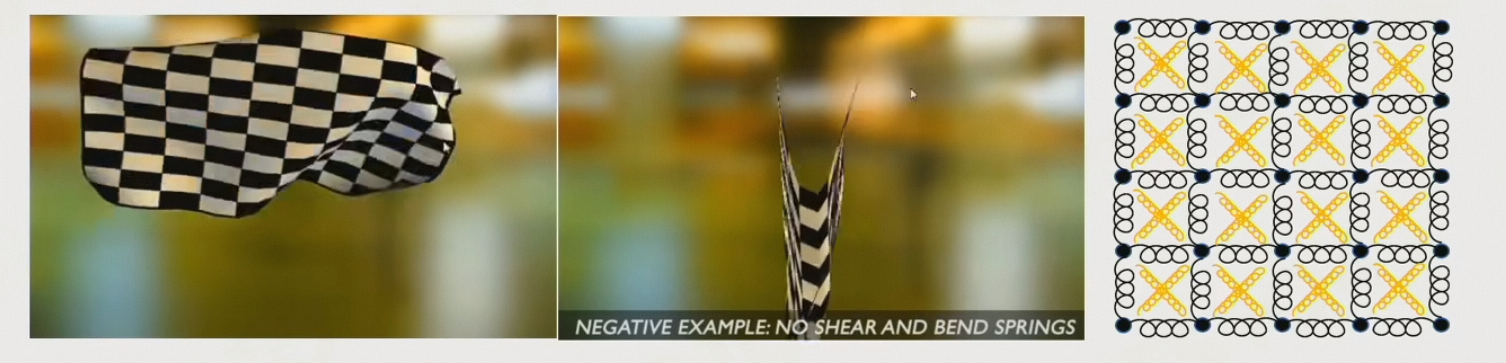
11.3.3.2 衣料结算–质点弹簧系统
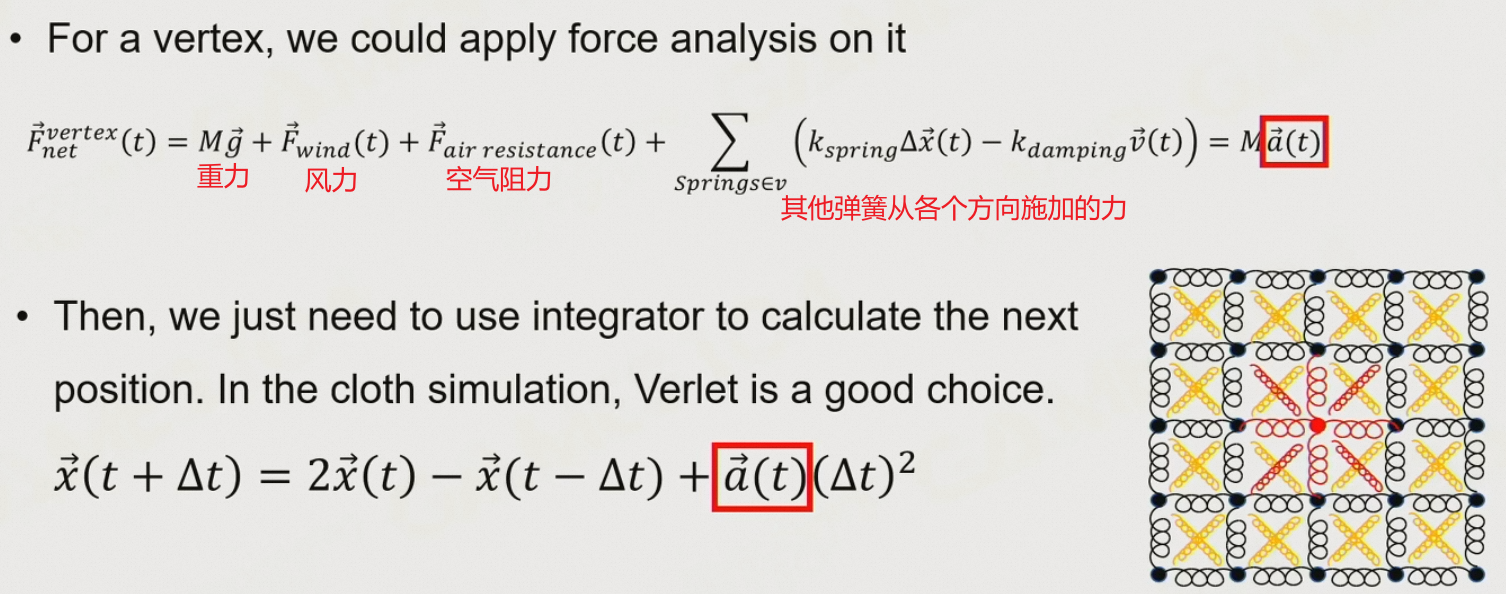
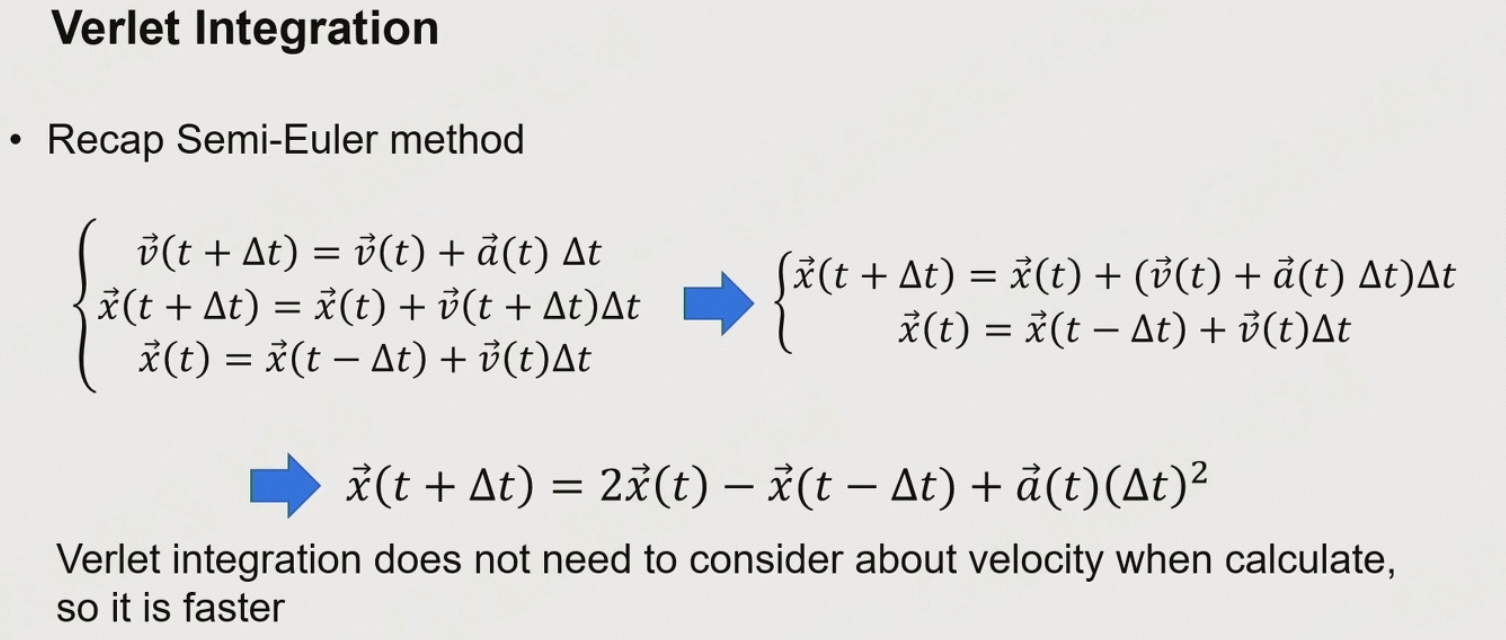
11.3.3.3 Verlet积分
通过相邻两帧的计算公式的合并,下一帧的位置只与当前帧位置、上一帧位置、当前帧加速度有关
- 模拟中,位移是最真实的
- 这样计算可以减小误差
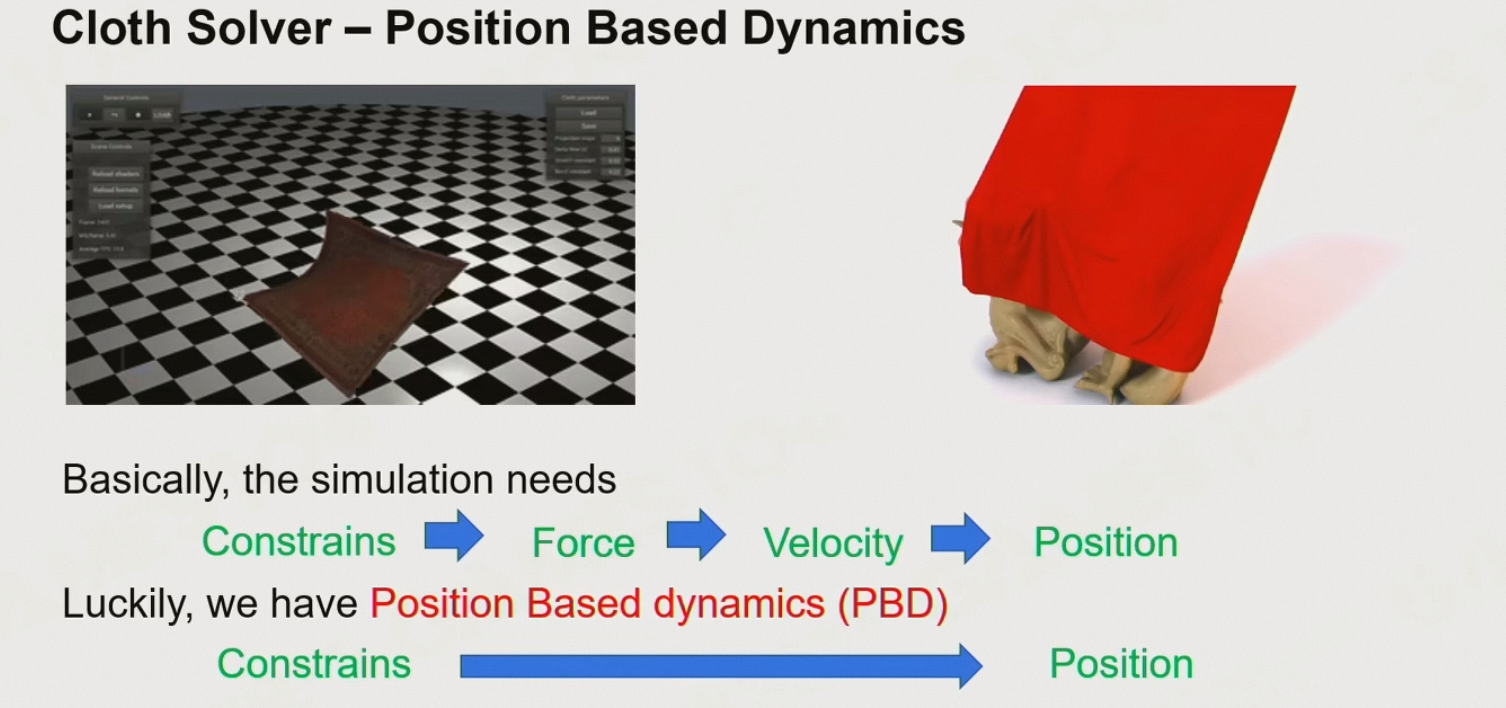
11.3.5 基于位置的动力学模拟 PBD
用拉格朗日约束求解位置,不需要通过力&速度
- 更加快、更加稳定、精度敏感时表现更好
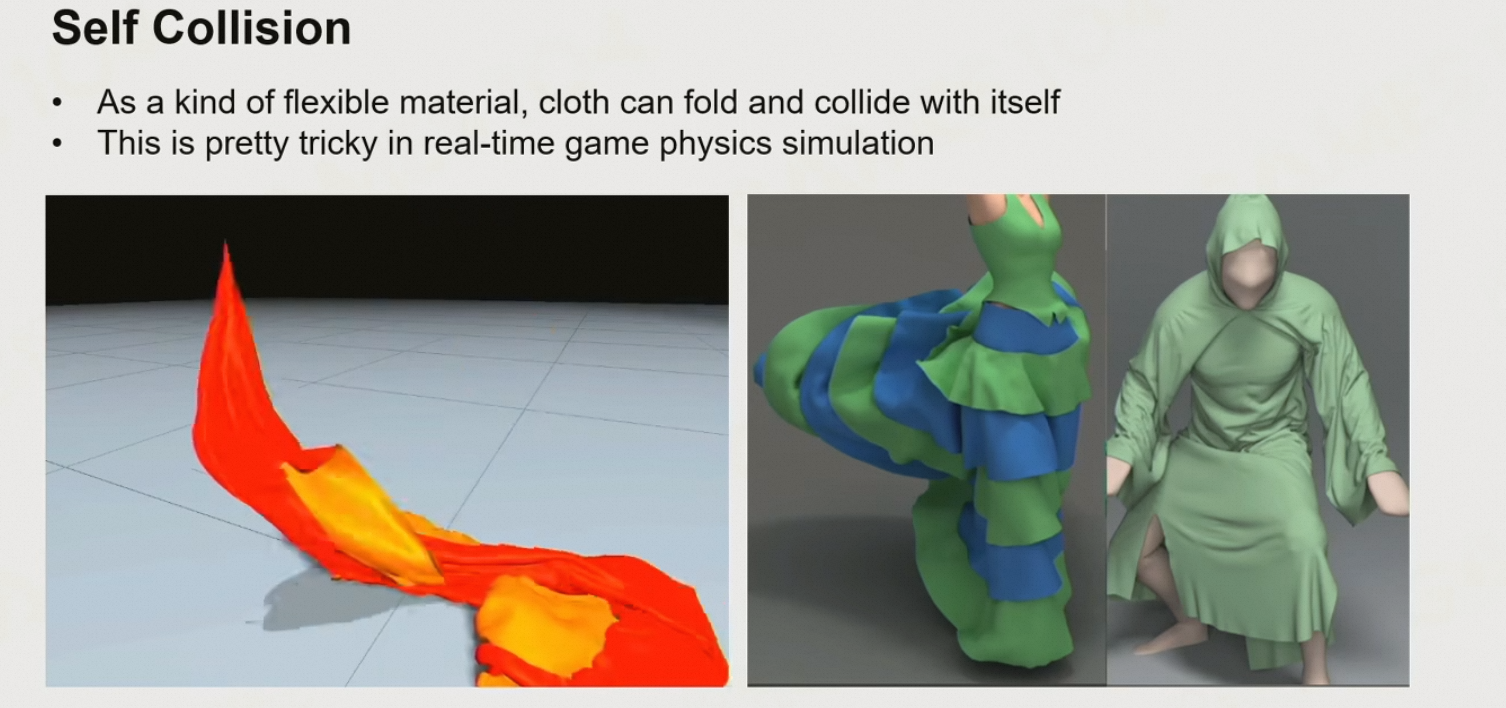
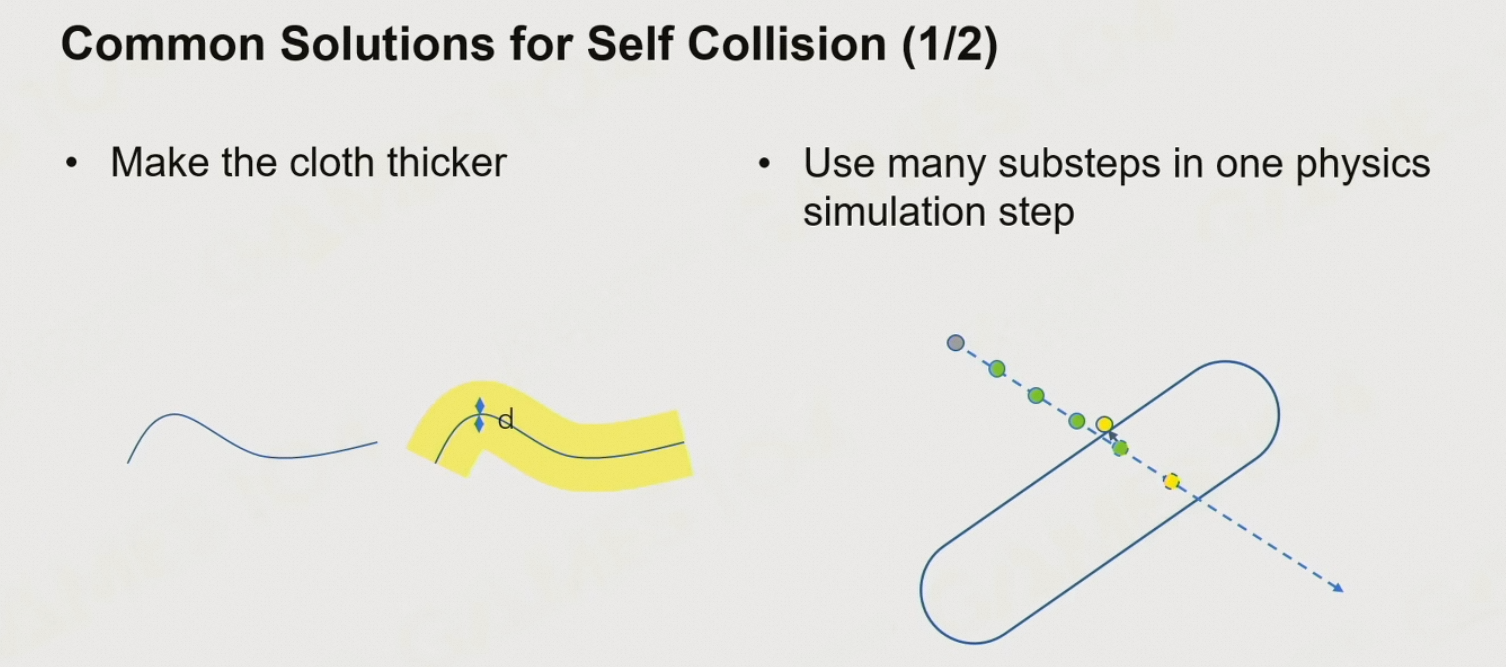
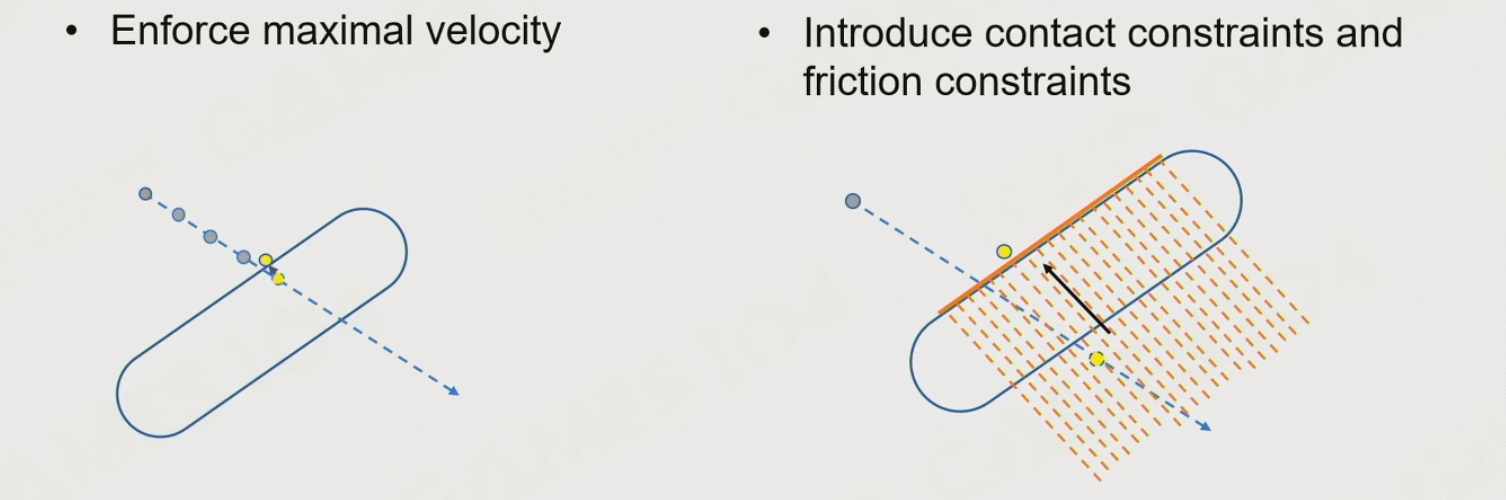
11.3.6 自穿插
- 加厚布料
- 增加布料的物理仿真步伐
- 设置最大的速度,保证每一步不会穿得过深,还可以弹回来
- 在布料的里面添加一个负向力场,将顶点弹回来
11.4 破坏模拟
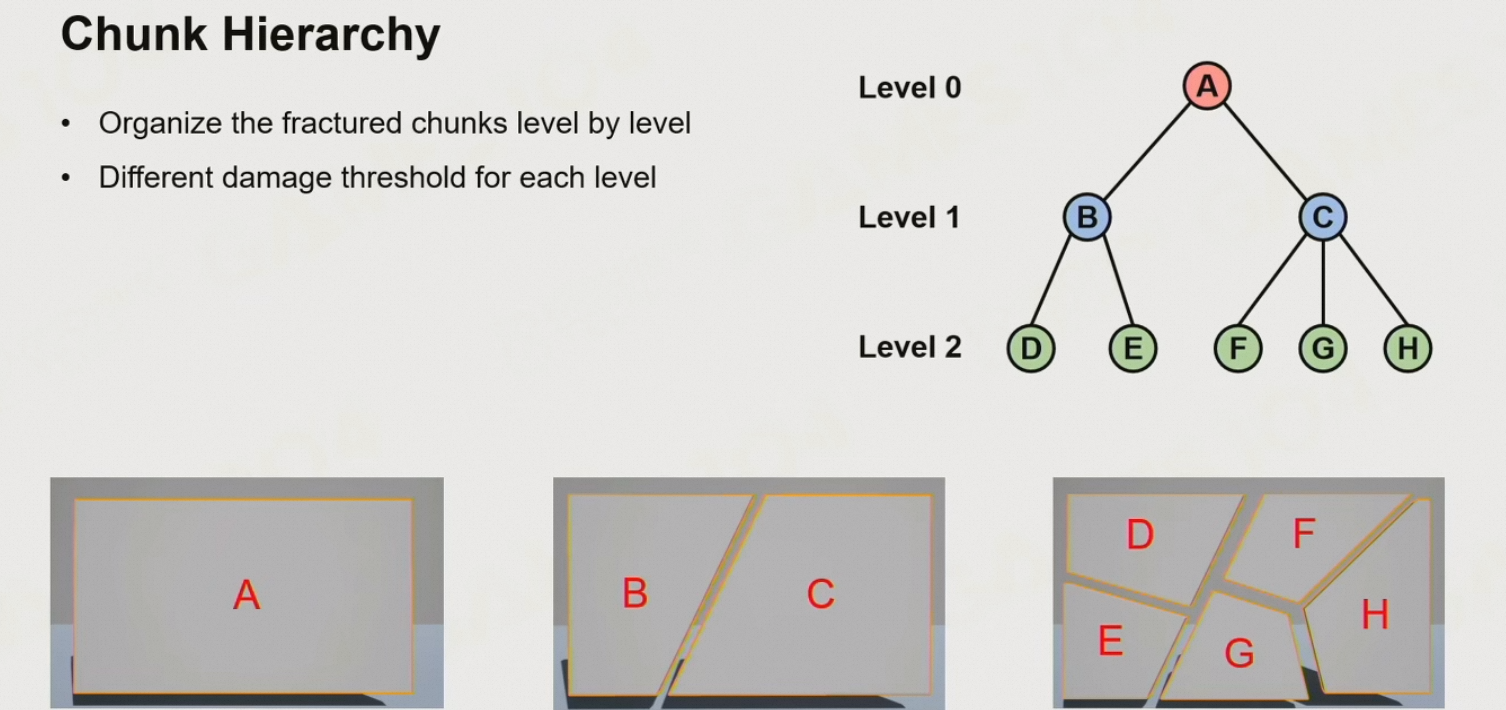
11.4.1 层级碎片
将整个表面按照层级分为多个碎片,形成一个树状结构
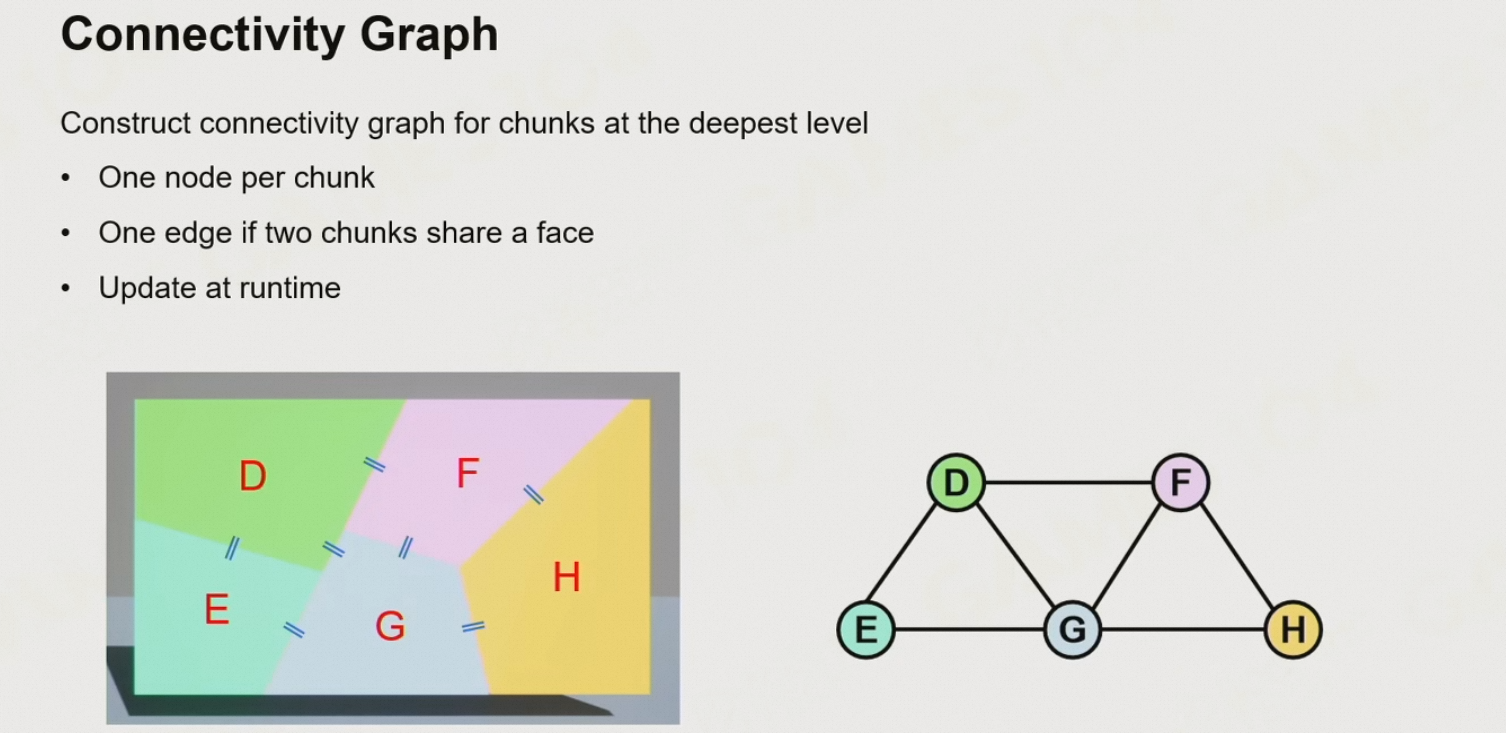
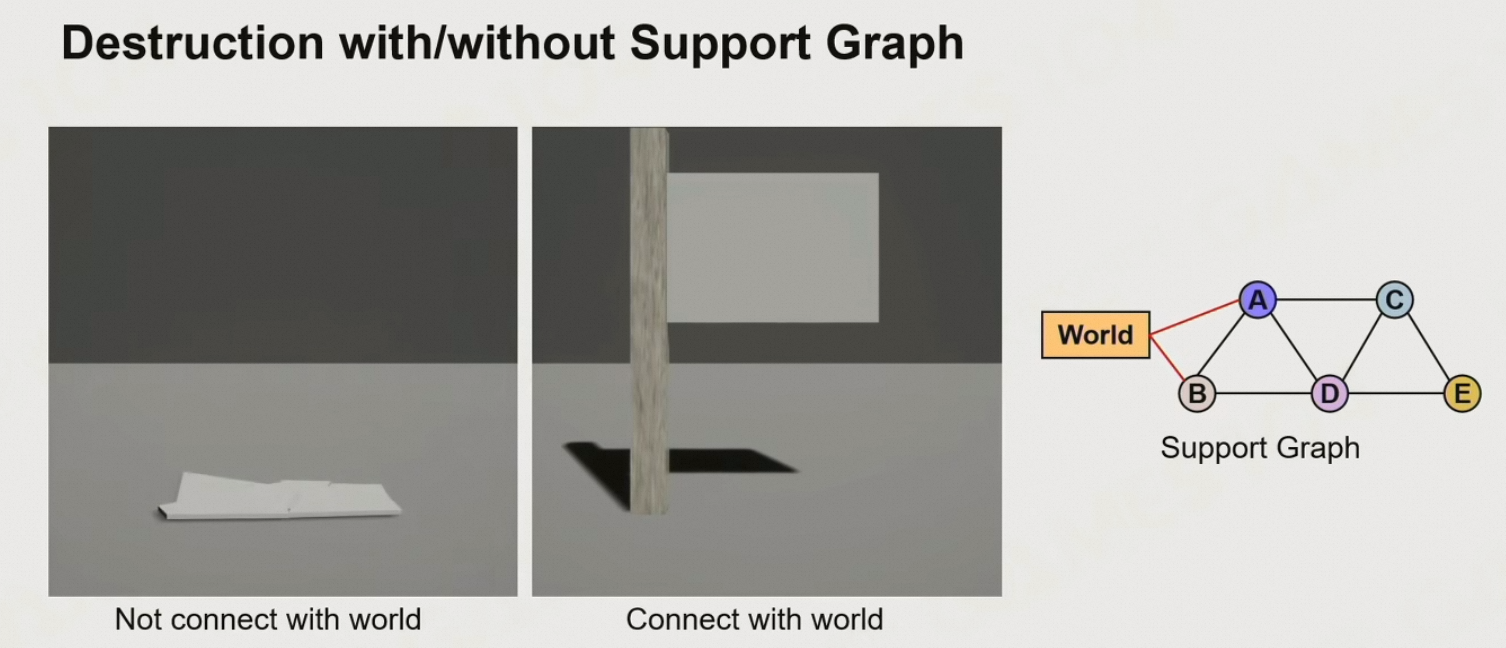
连接相邻碎片,得到连接图
设置连接权重,表示该连接的硬度
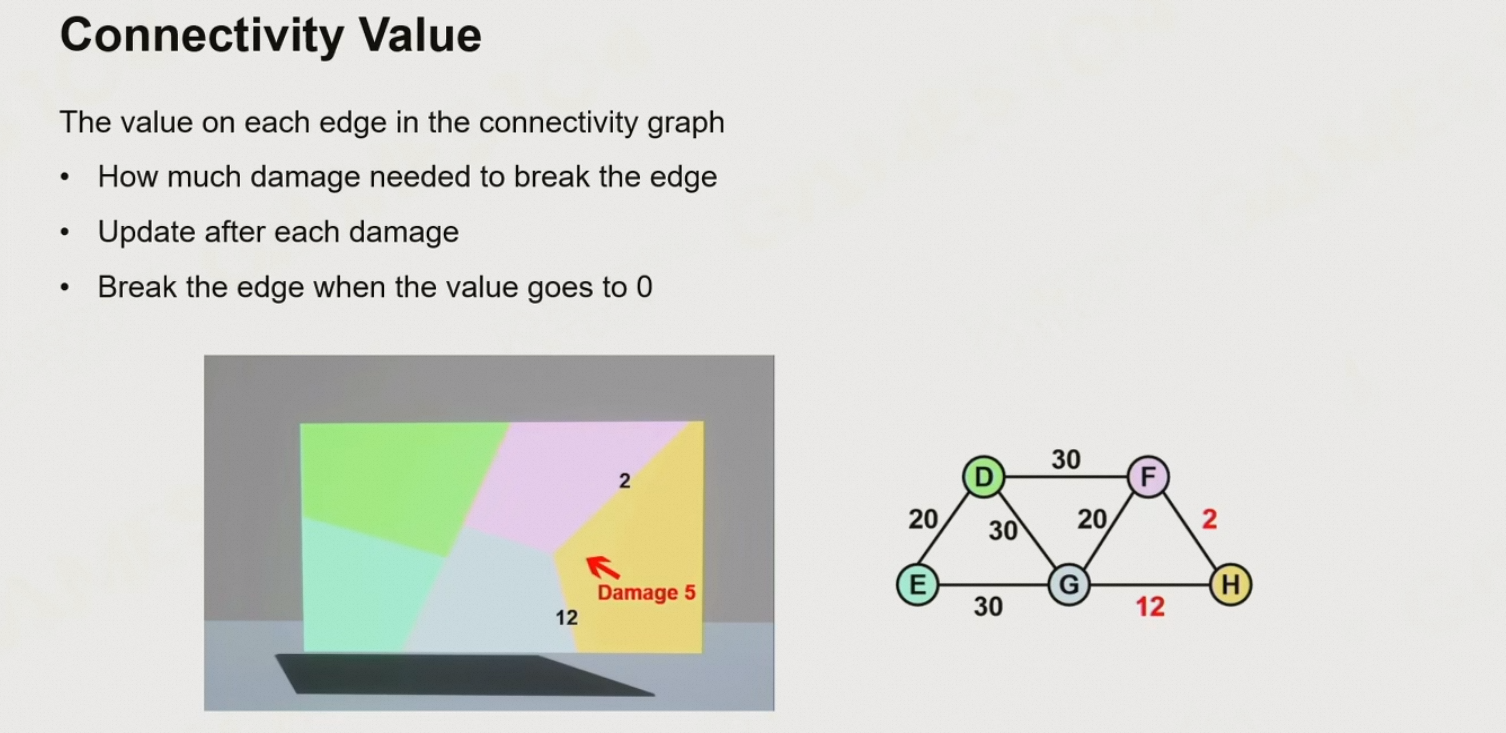
当施加的冲量大于硬度时,该连接就会断裂,造成实际的伤害
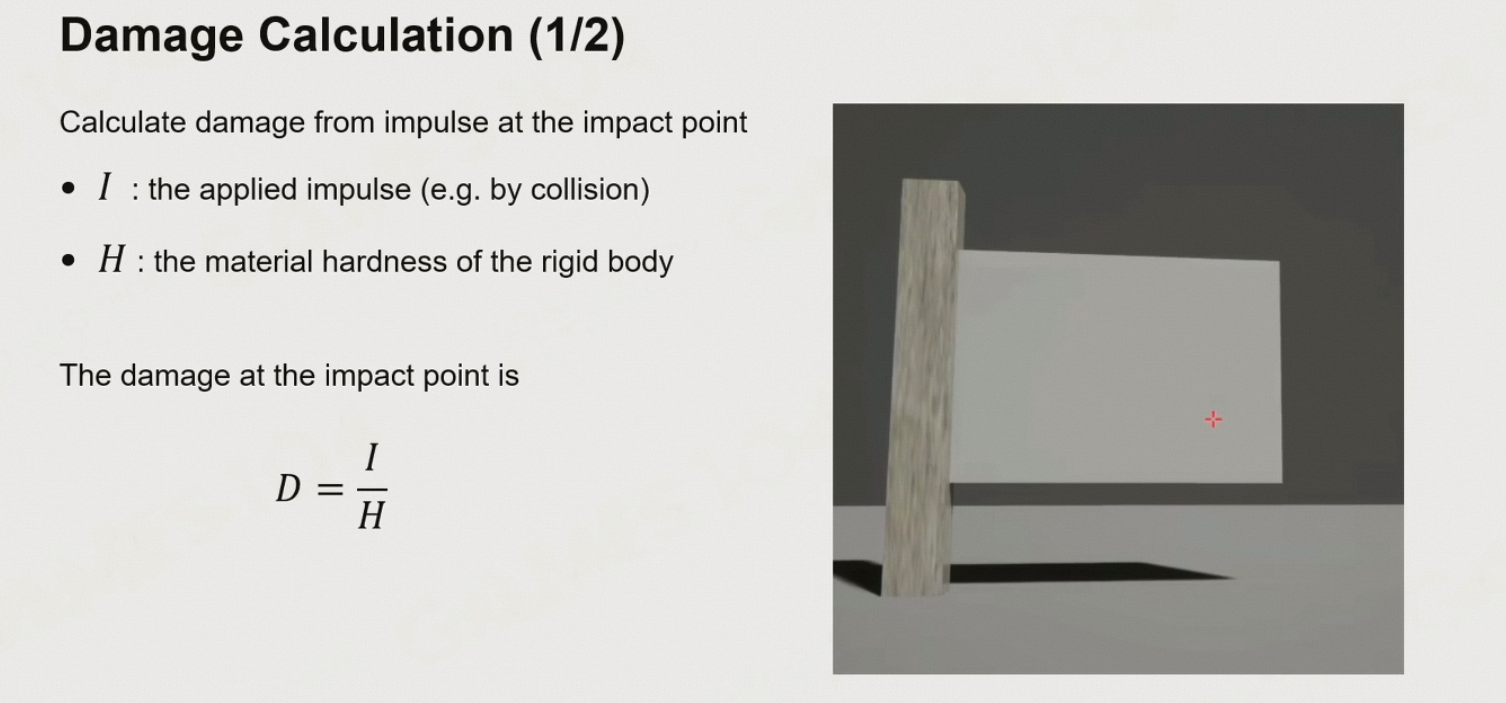
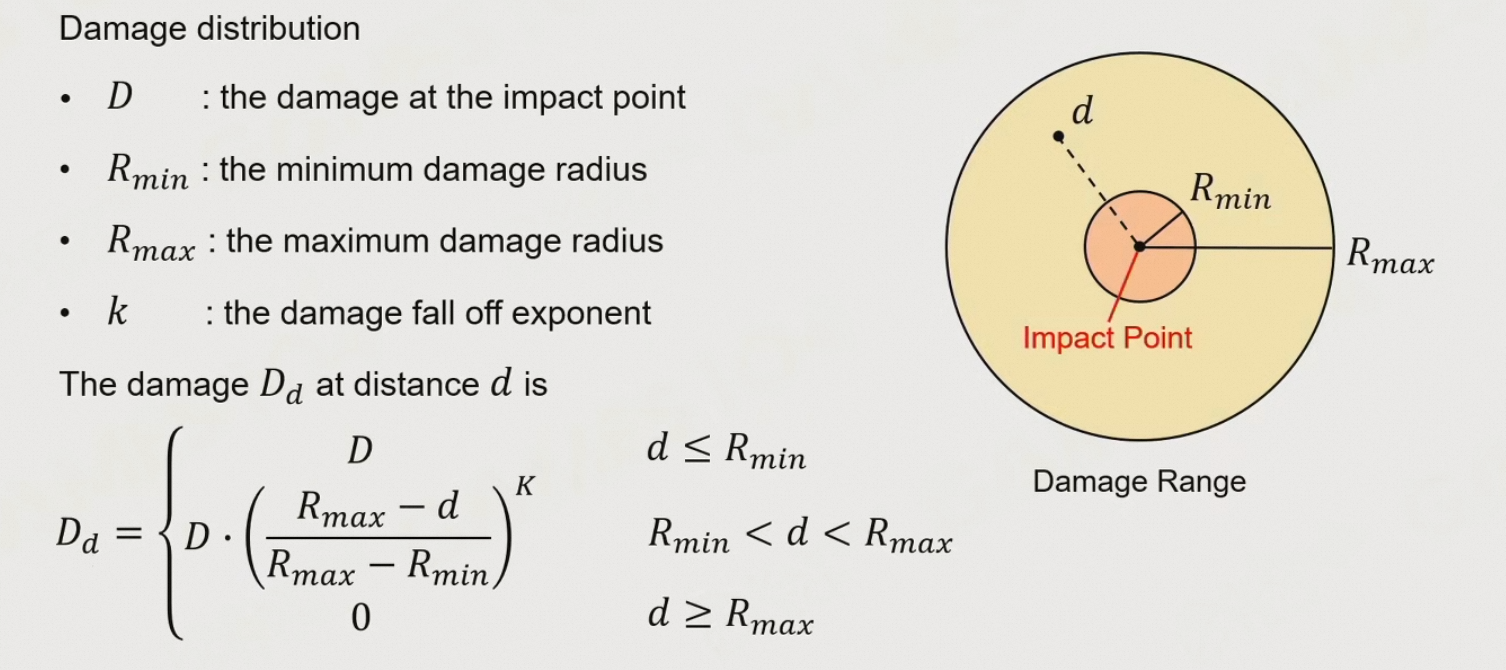
当打中一个点时,会将damage以同心圆的方式传播出去
11.4.2 与游戏世界连接
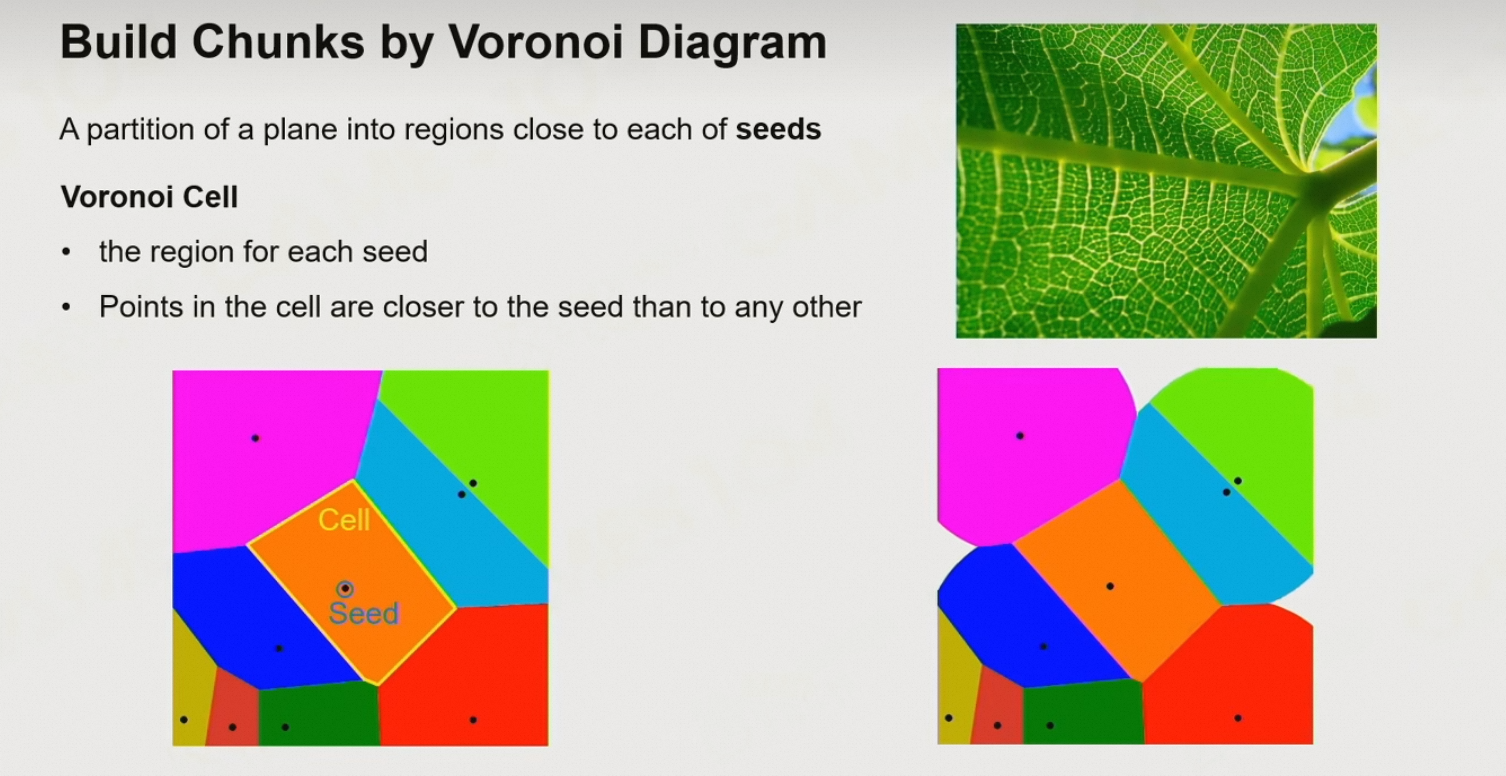
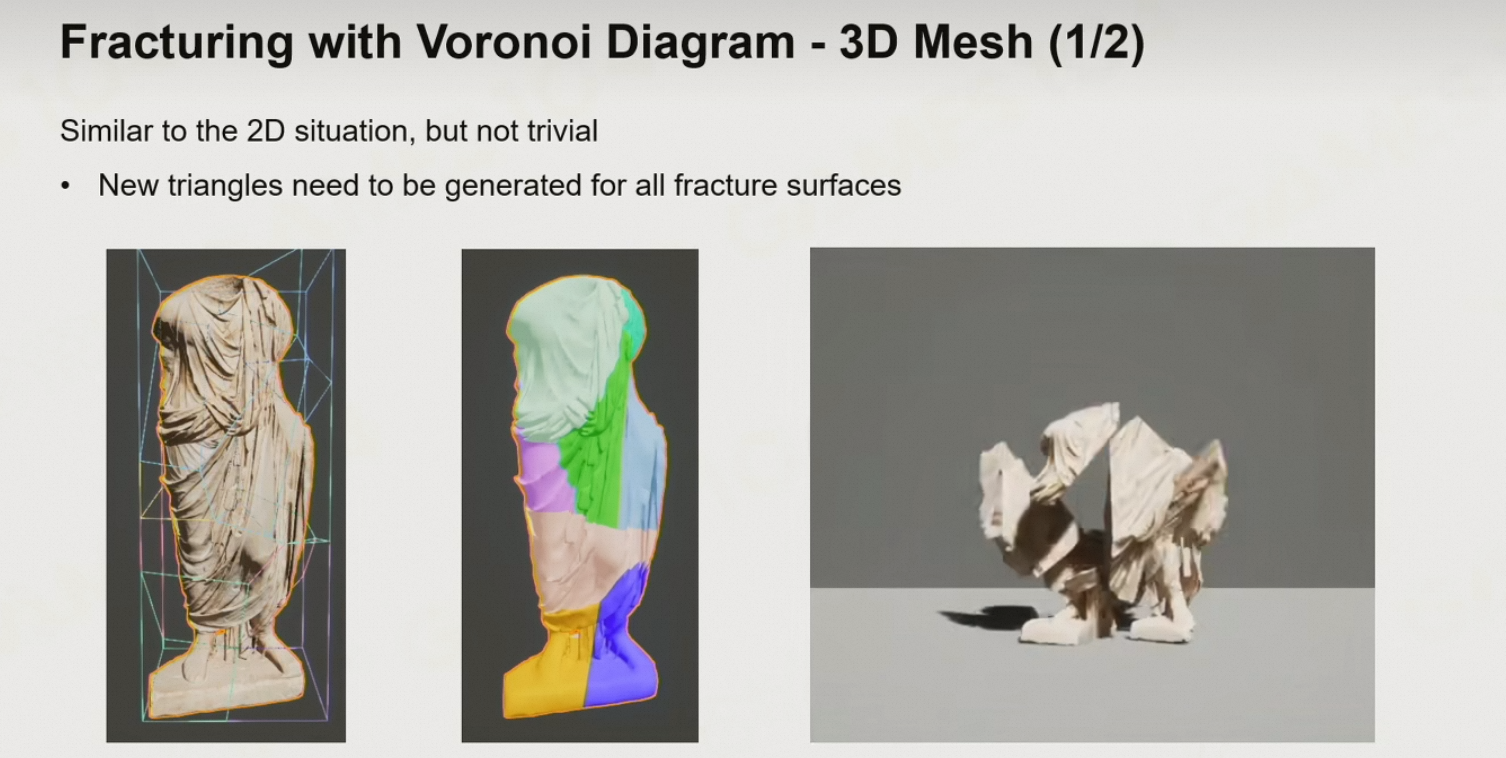
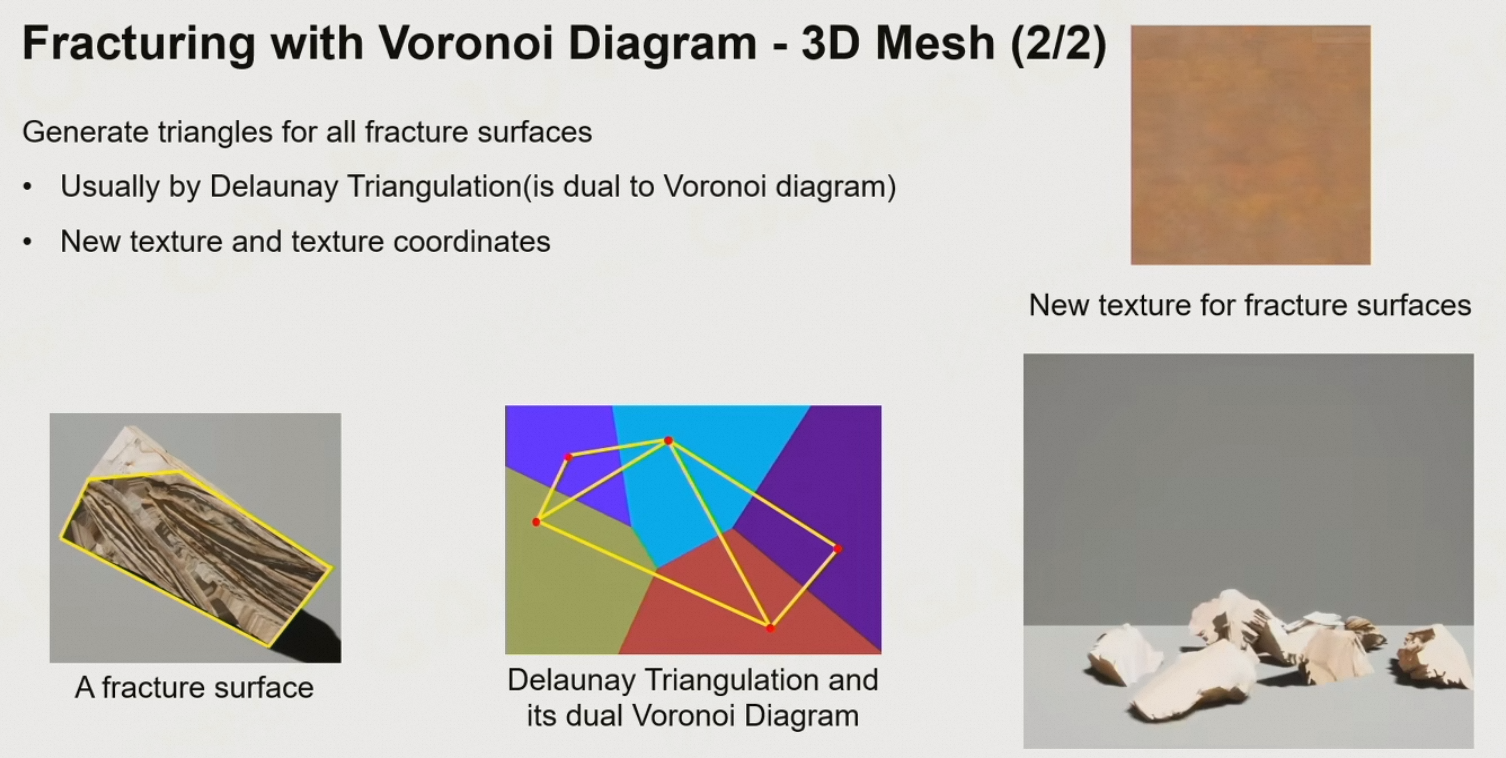
11.4.3 自动生成碎片:Voronoi算法
在空间中洒下一些种子,从种子开始,自动划分该空间
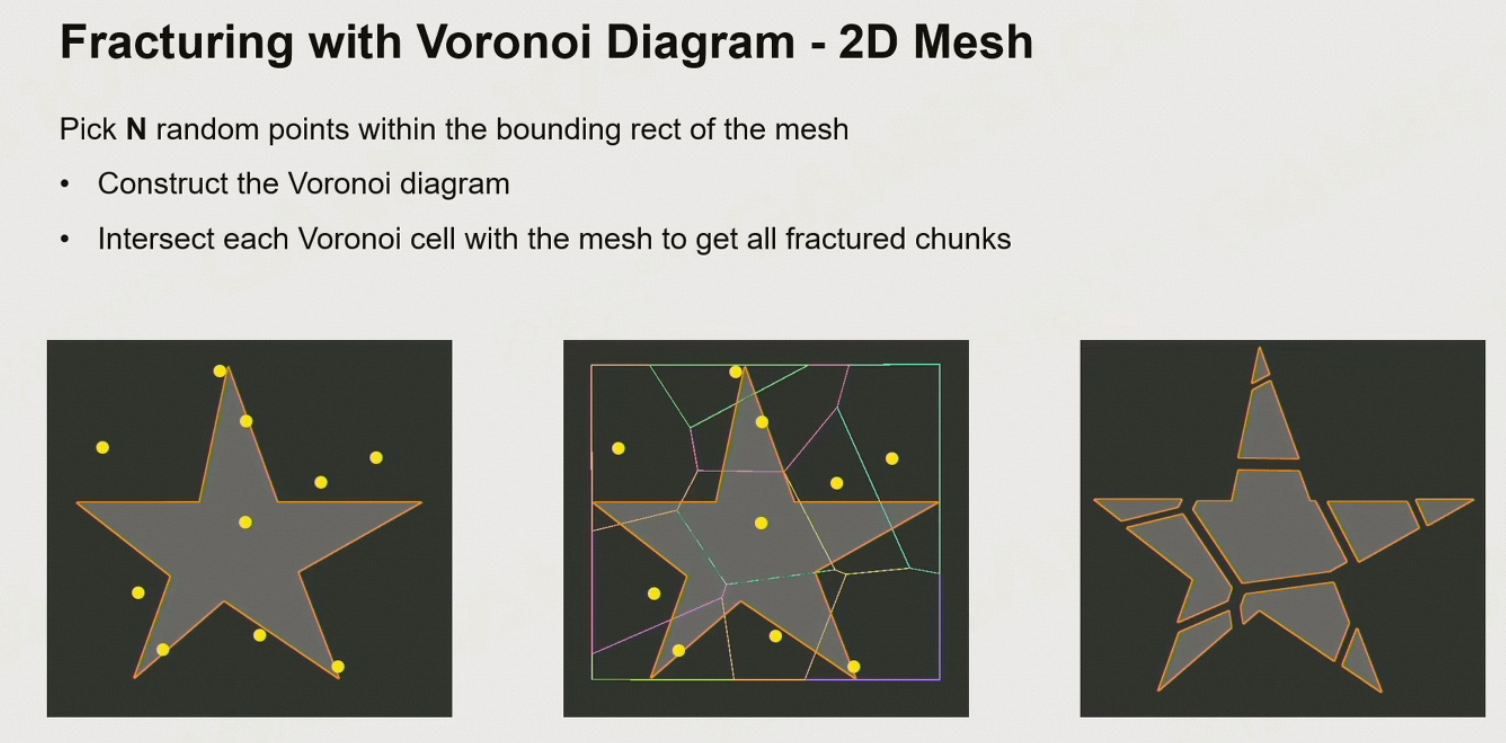
生成断裂处的纹理:
- 使用3D Texture表示物体的纹理,碎裂时直接在3D Texture中采样即可
- 提前离线渲染好断裂处的纹理,碎裂时切换到断裂处的纹理
通常不会让碎裂后的物体参与游戏逻辑的计算
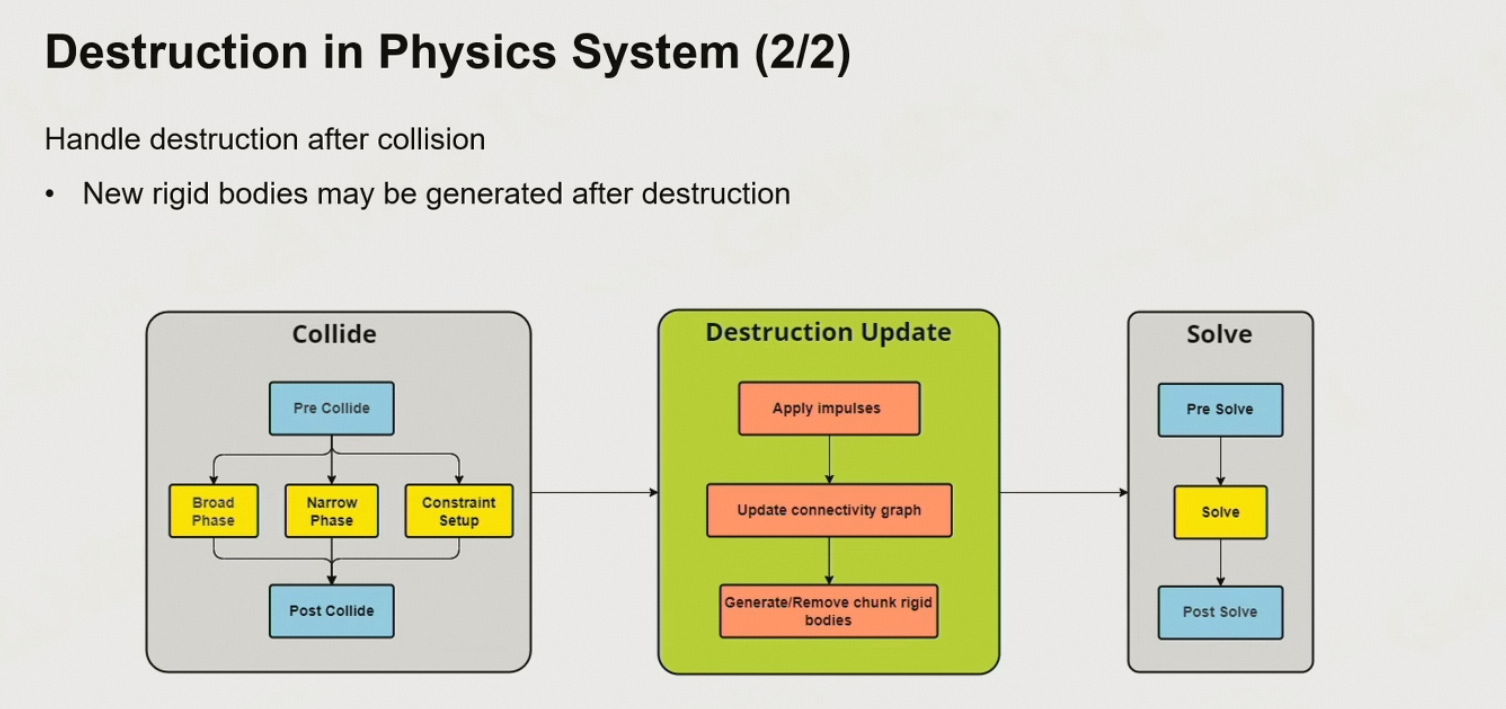
11.4.4 物理系统中的Destruction
11.4.5 破坏后的回调函数
在破坏后,要提供一些回调函数,供上层开发者选择是否播放特效、音效或者其他效果
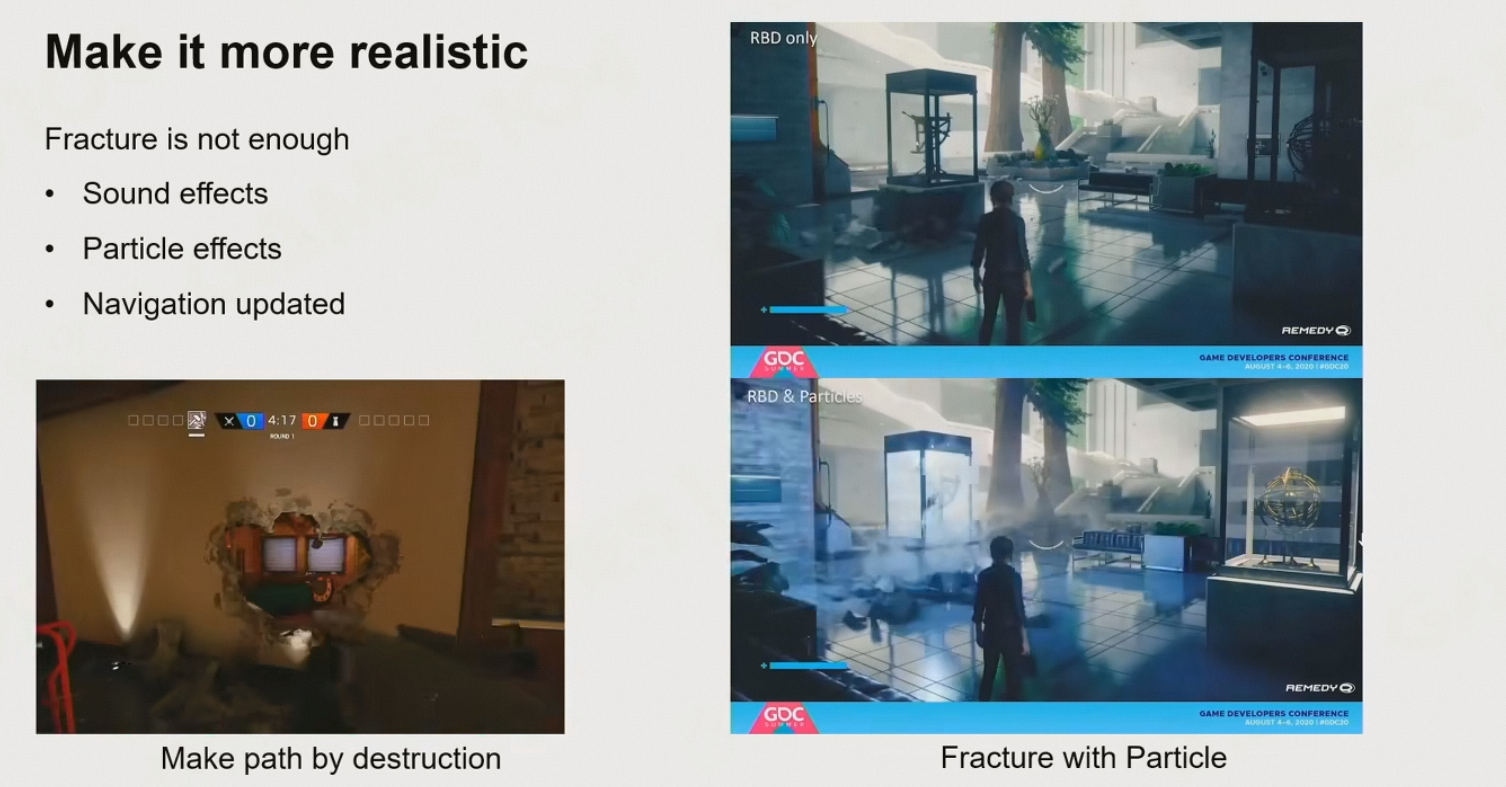
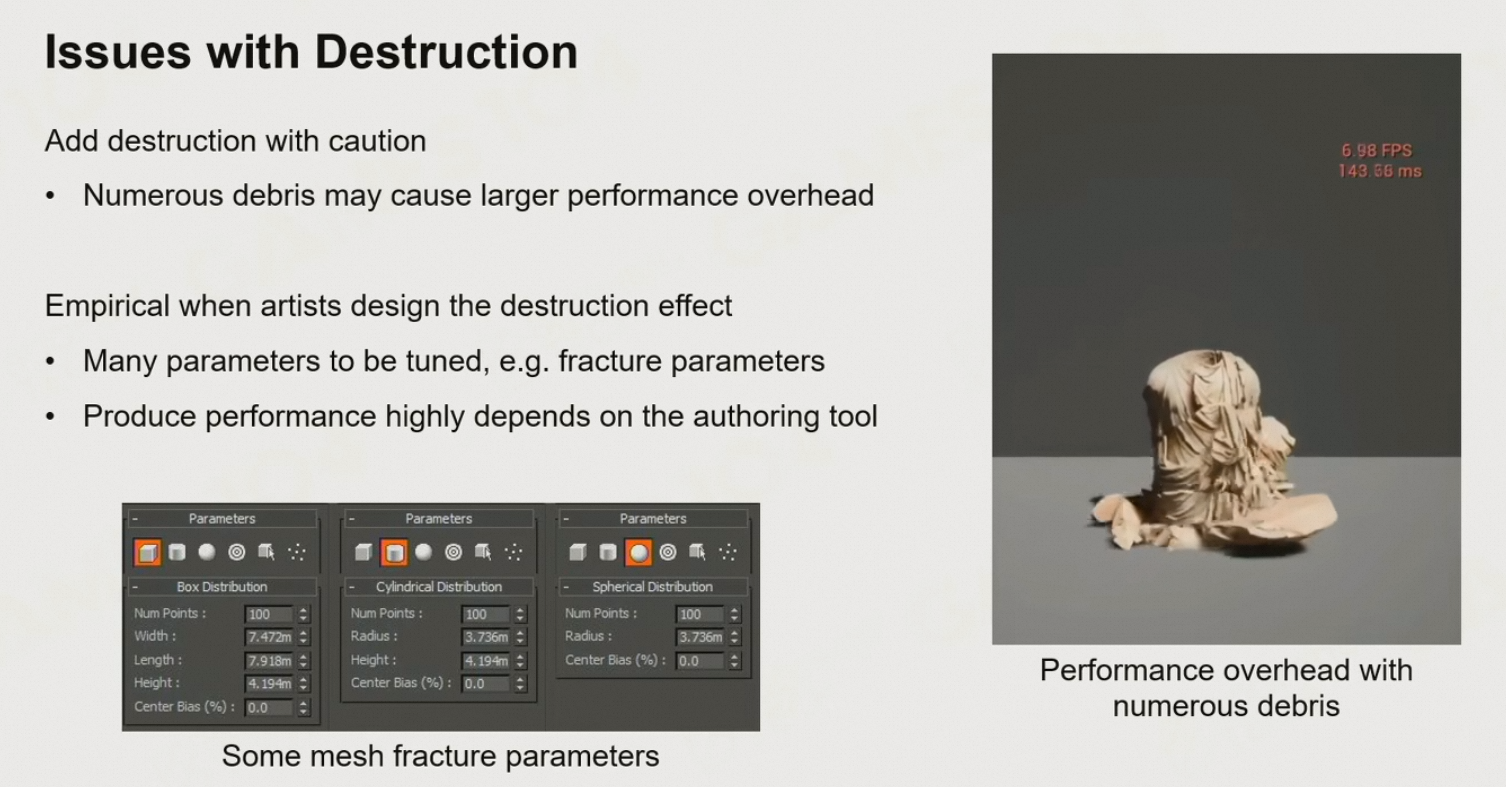
11.4.6 Destruction产生的问题
一个物体碎成很多个碎片后,会产生大量的独立物体,它们之间会产生大量碰撞
11.5 载具模拟
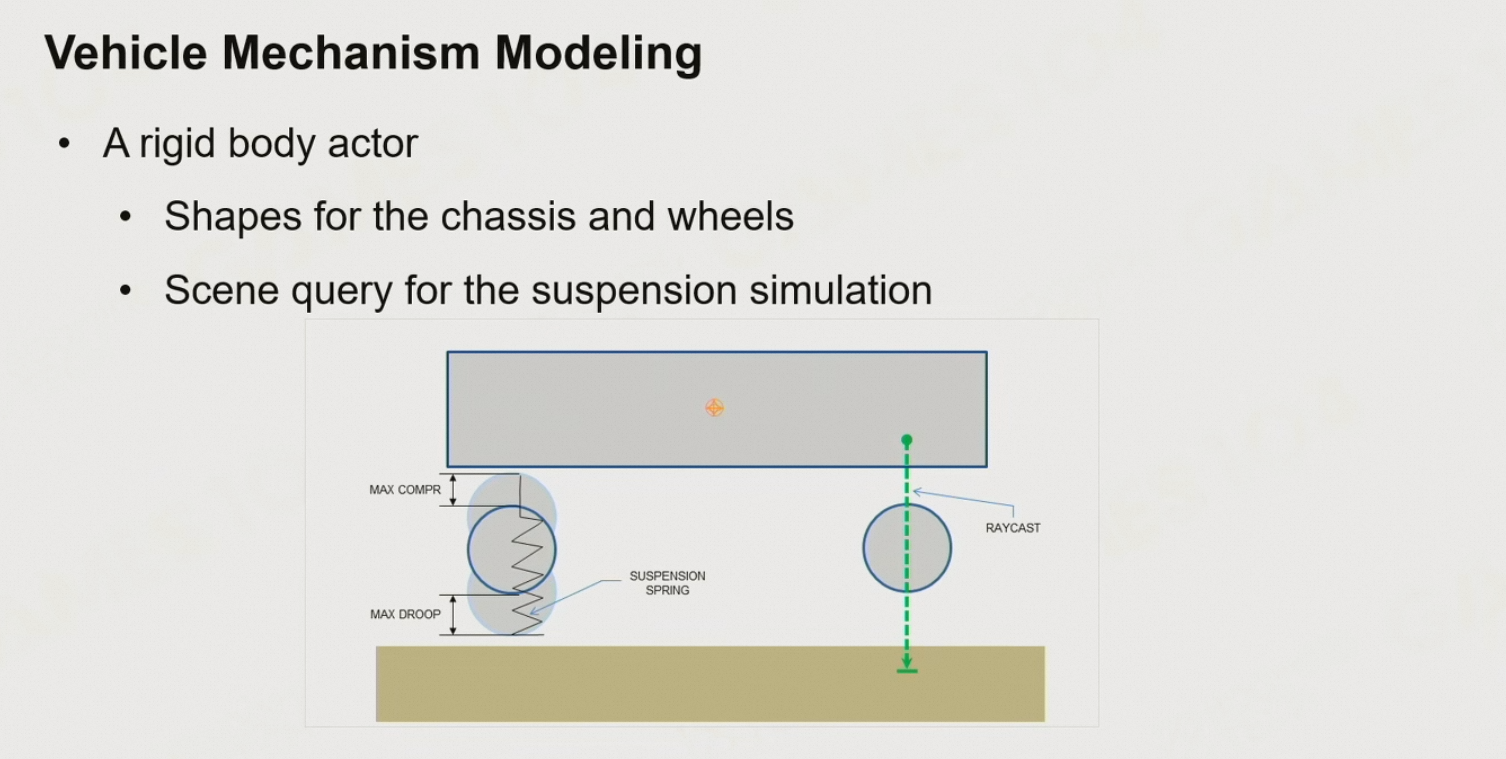
11.5.1 载具结构建模
- 通过rigid body模拟车身
- 轮子是弹簧,但是也会与地面产生碰撞
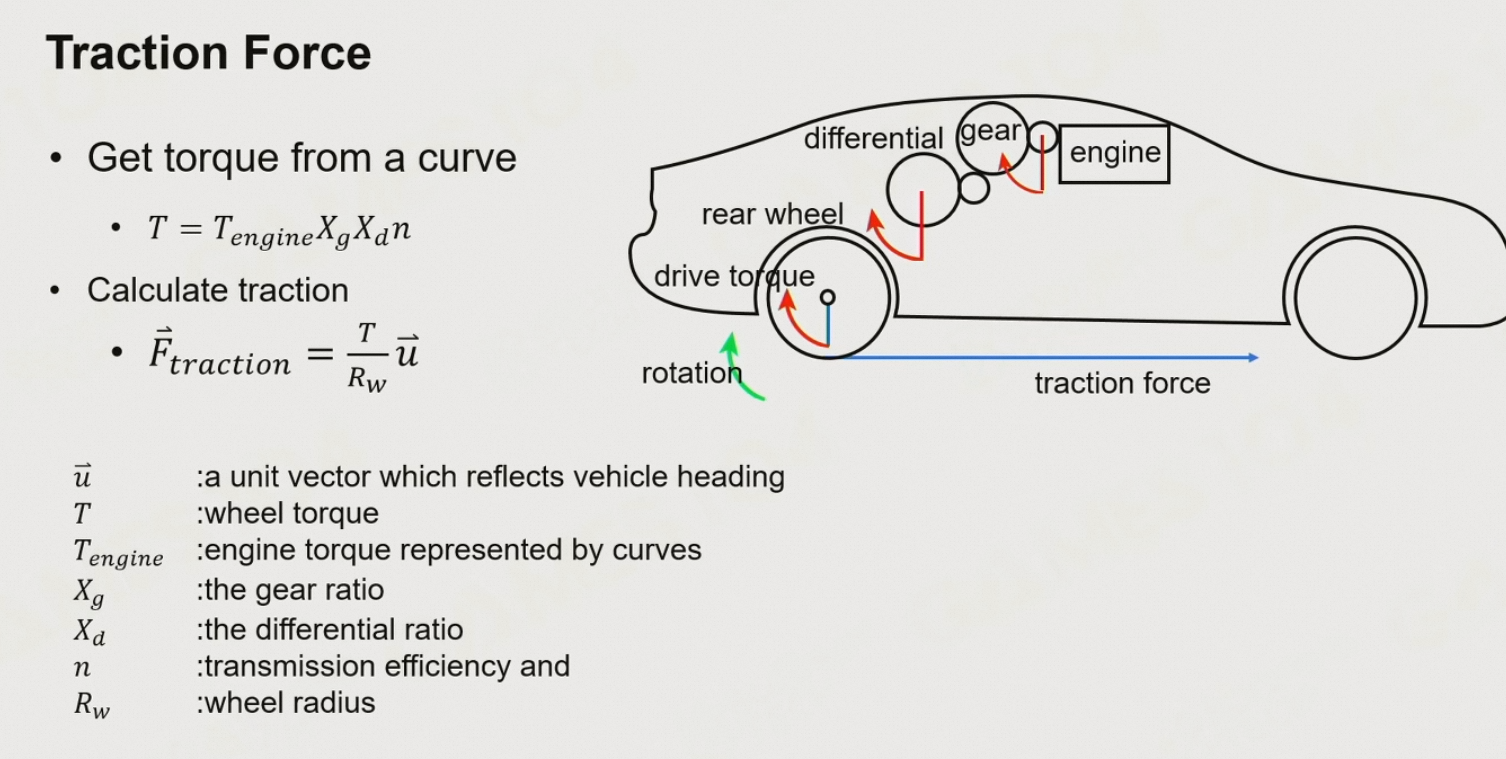
11.5.2 驱动力
- 由引擎
engine产生扭矩torque - 经过变速箱
gear和差分器differential,将扭矩差分到各个轮子上,转化为轮子真实的扭矩drive torque - 轮子的扭矩与地面作用,产生向前的驱动力(静摩擦力)
11.5.3 悬挂力
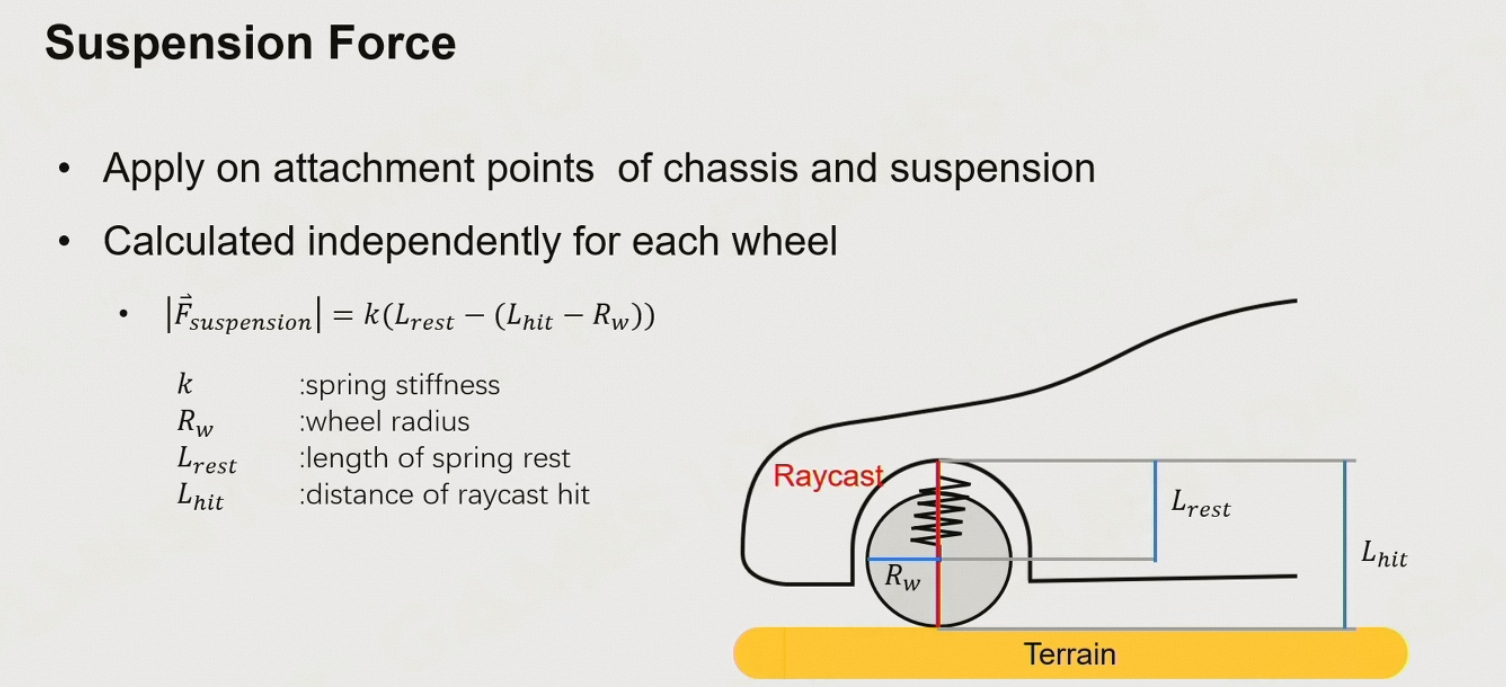
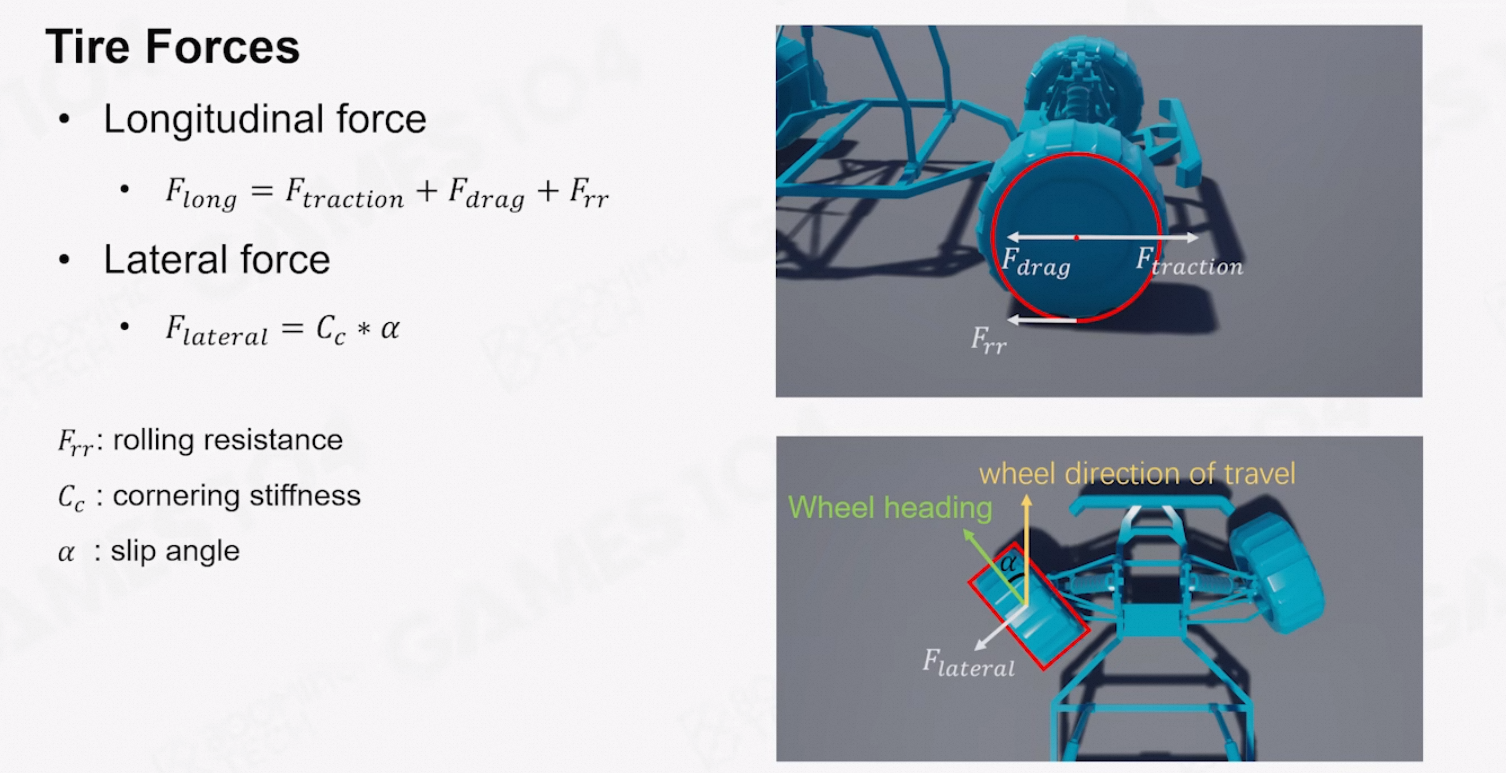
11.5.4 轮胎力
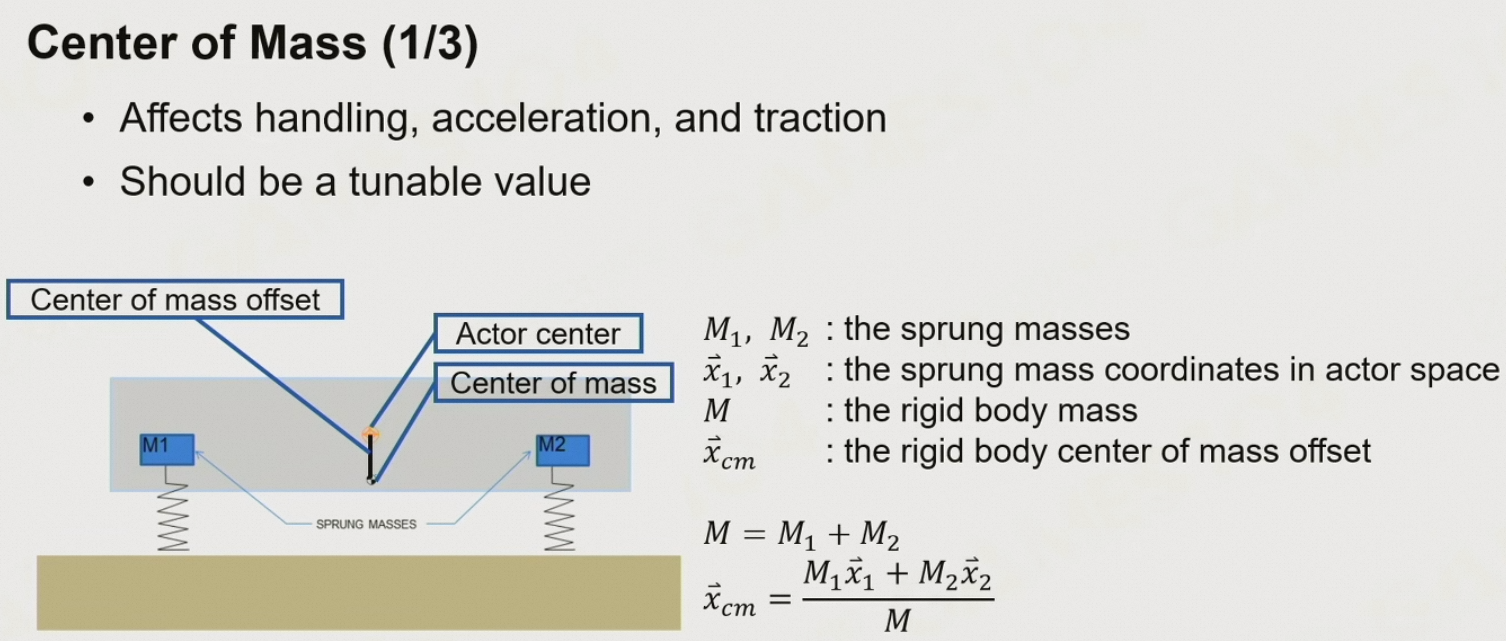
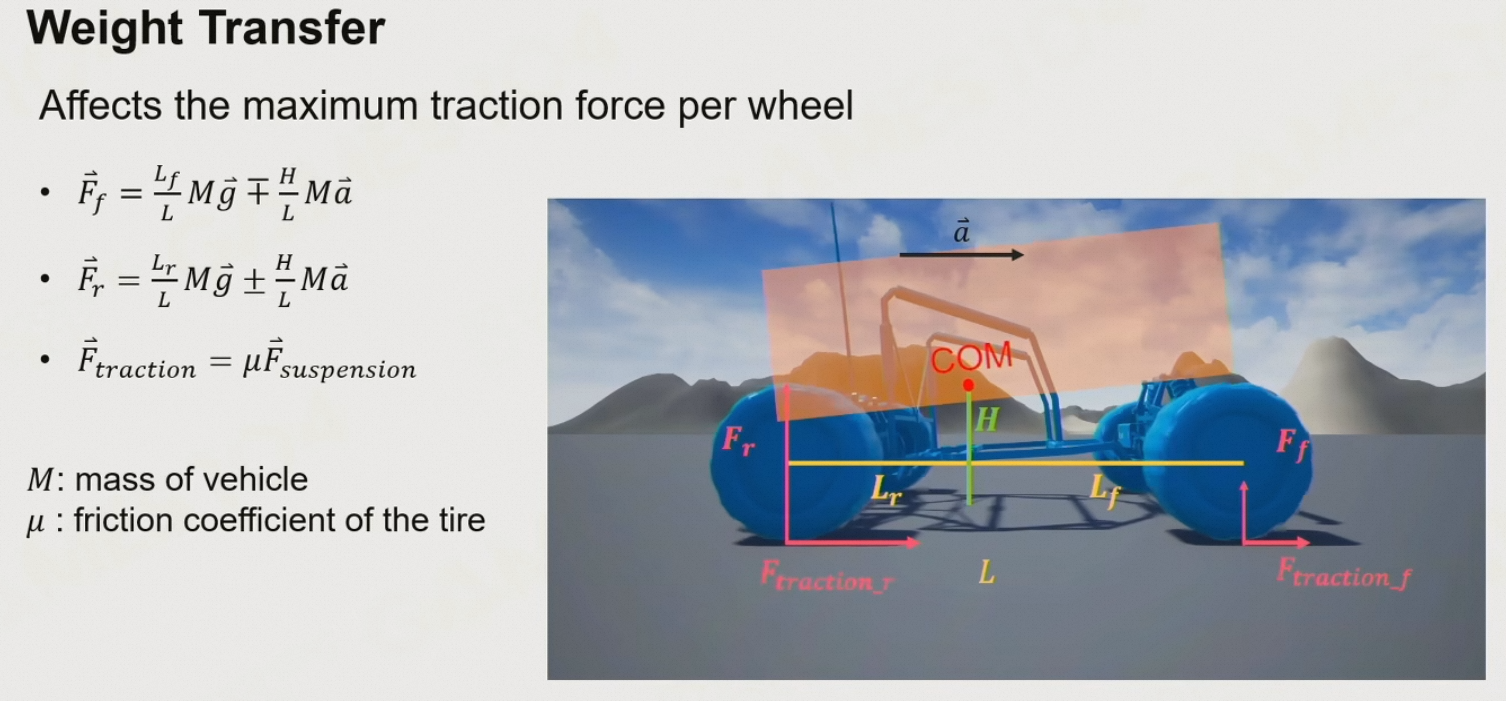
11.5.5 重心
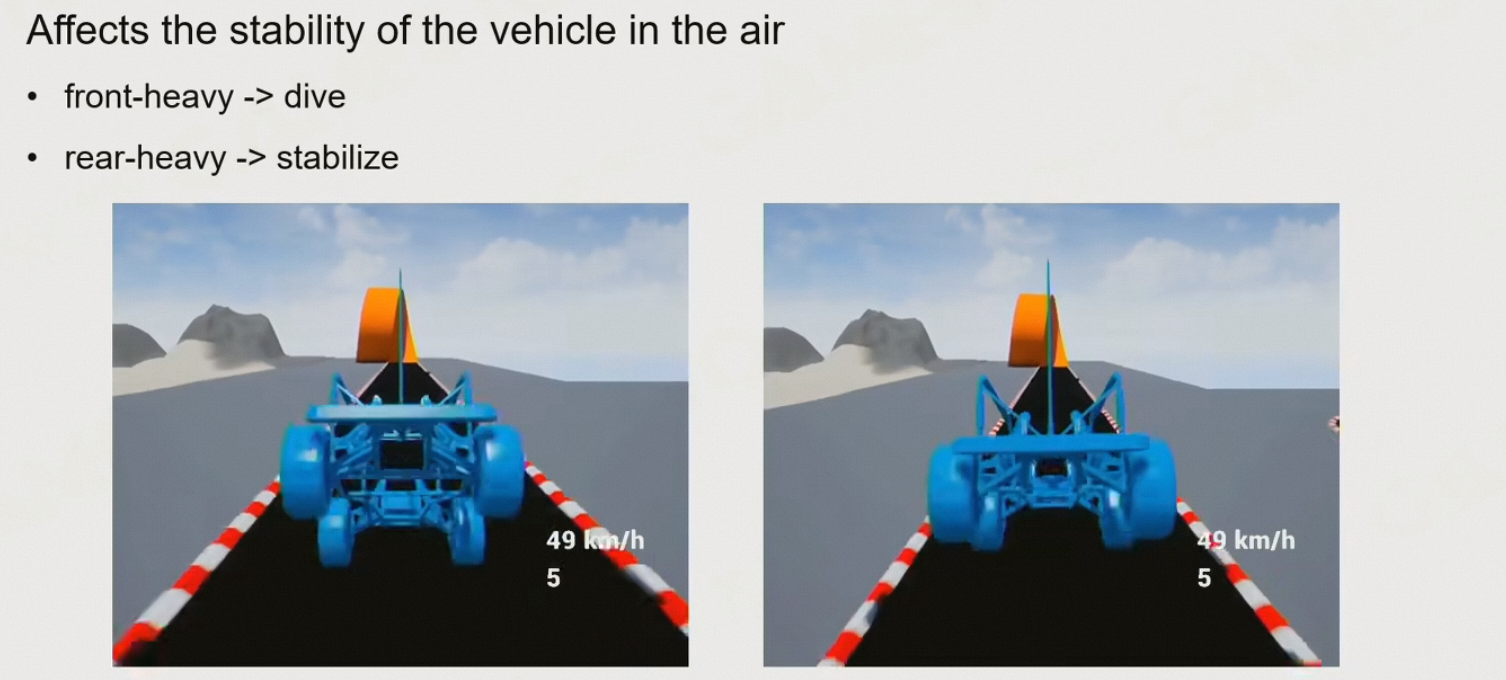
重心会对汽车在空中的稳定性产生影响:
- 重心靠前,容易翻滚
- 重心靠后,更加稳定
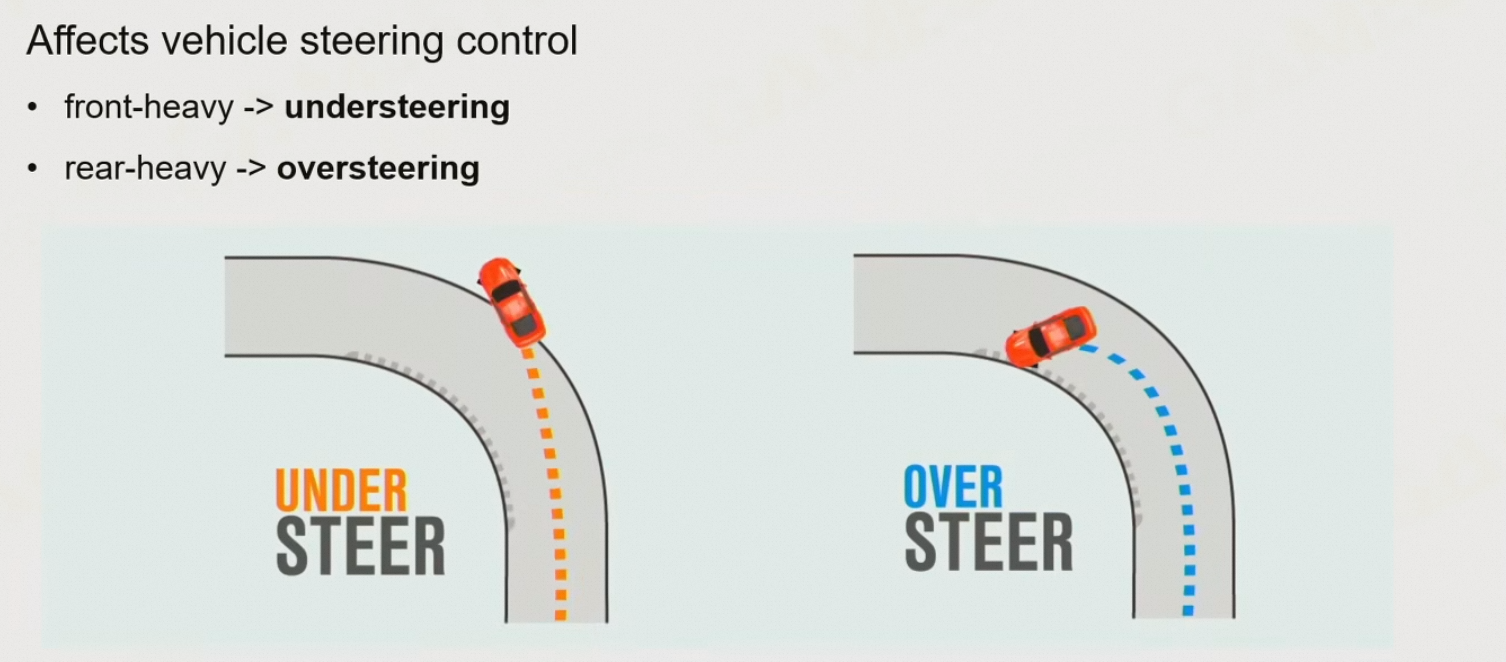
重心会对转向的驱动力产生影响
- 重心靠前:转向力更低
- 重心靠后:更容易转向
11.5.6 重心的变化
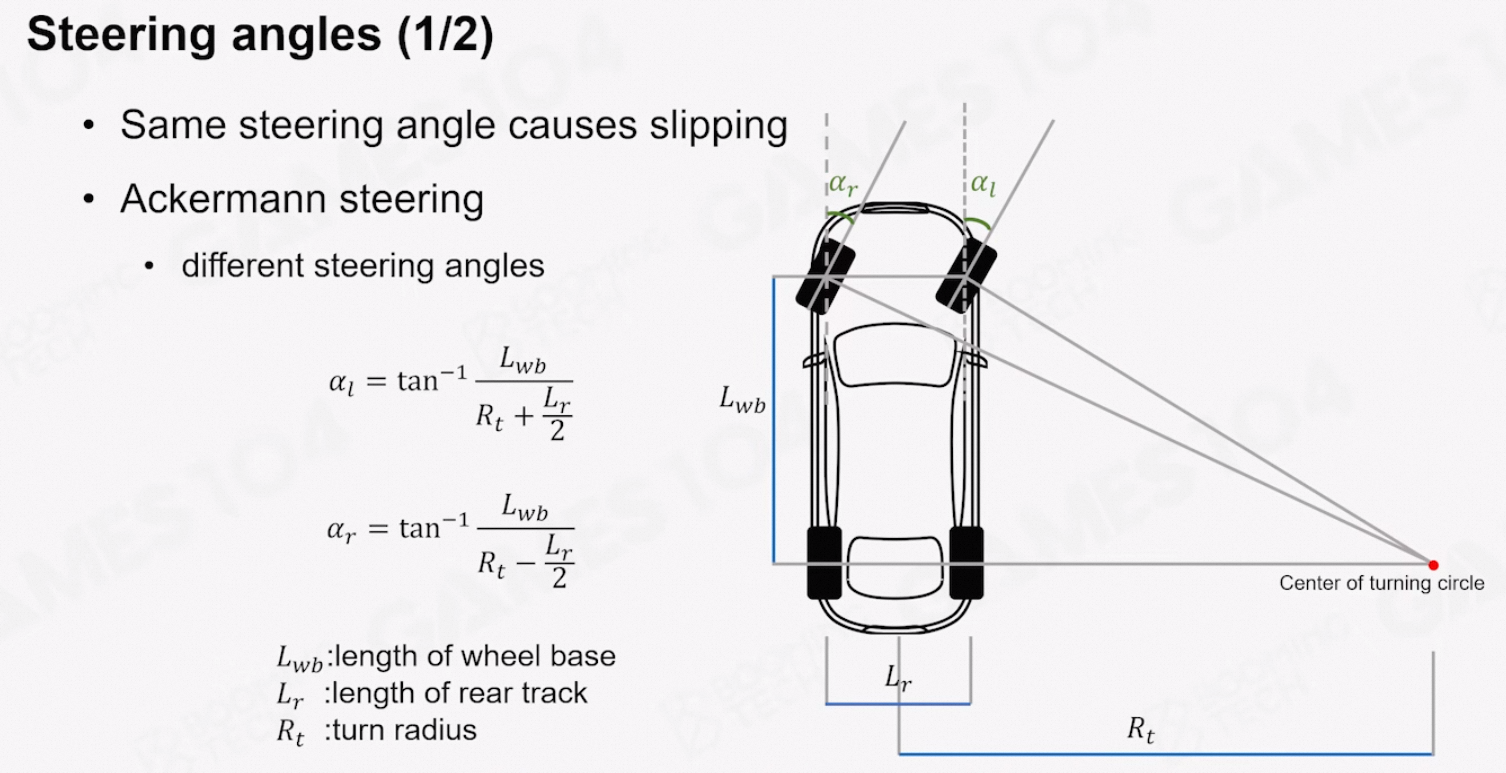
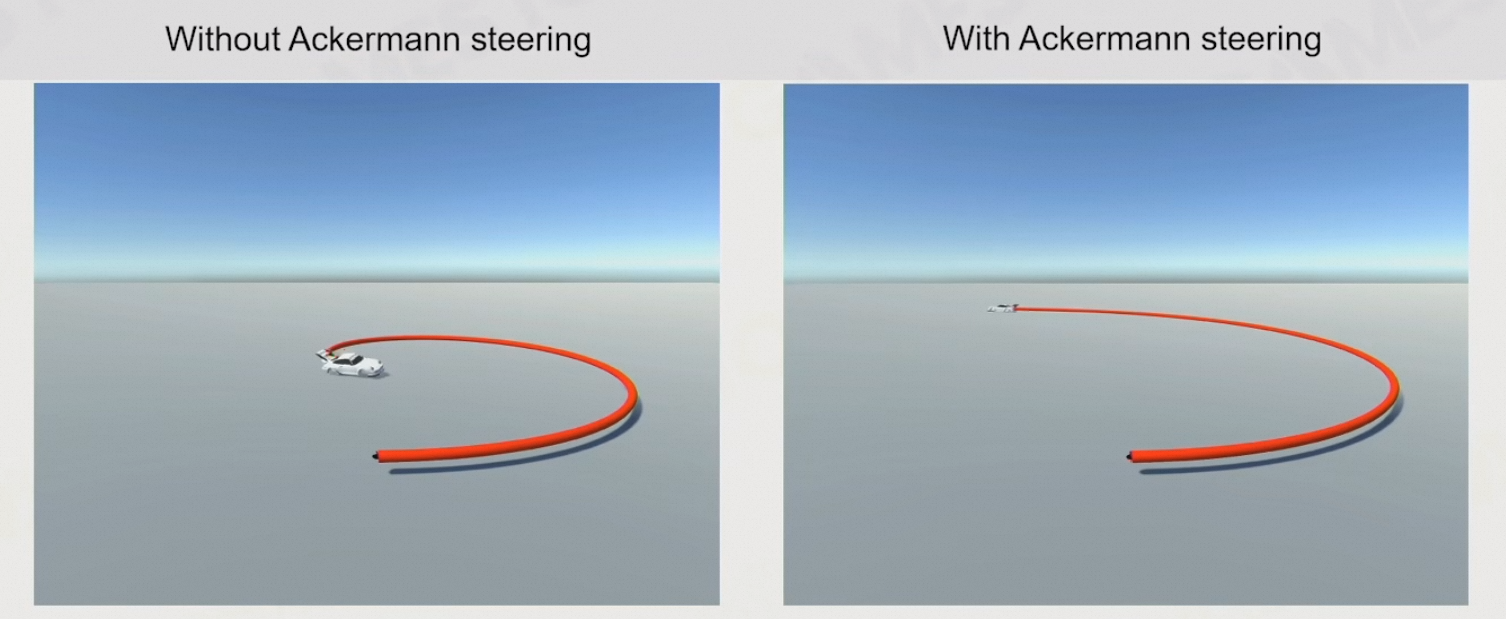
11.5.7 转向角
11.5.8 Advanced Wheel Contact

11.6 PBD/XPBD
拉格朗日力学:用约束反向推导运动
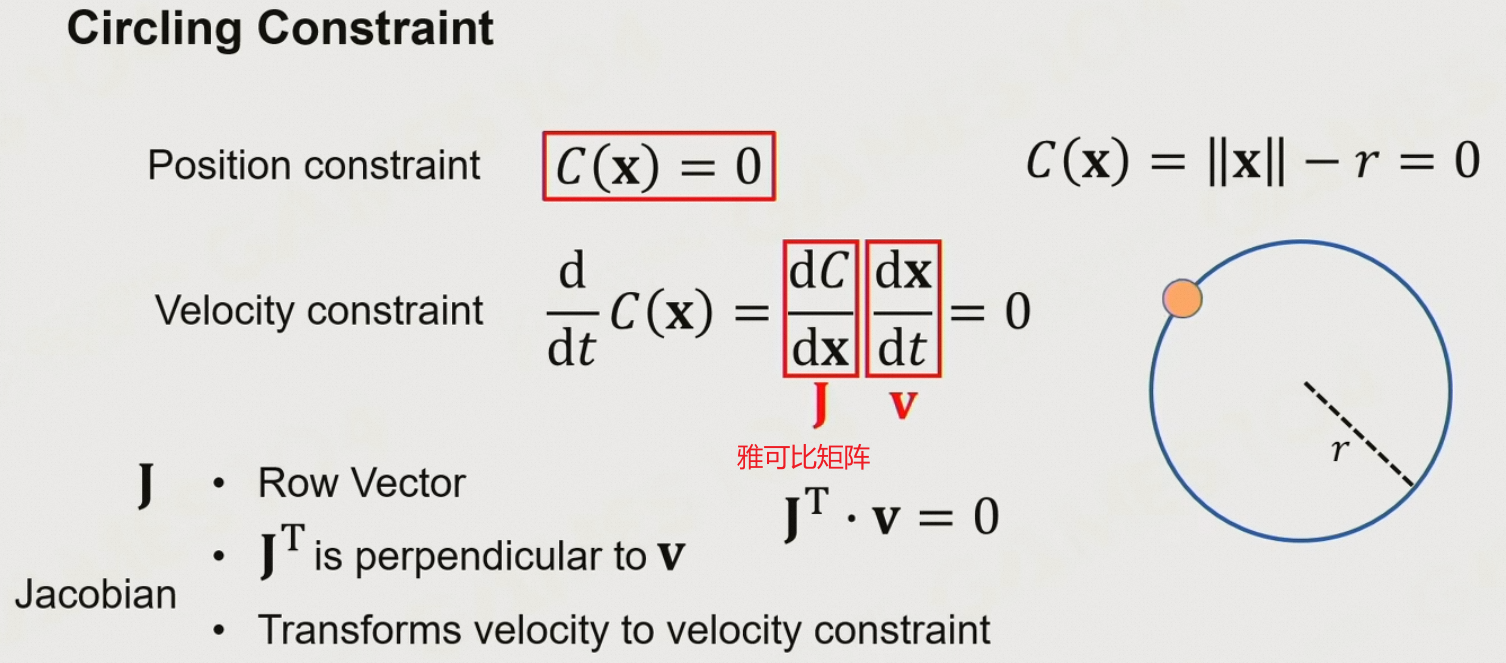
11.6.1 约束示例
圆周运动约束:始终绕着原点,半径一定的运动
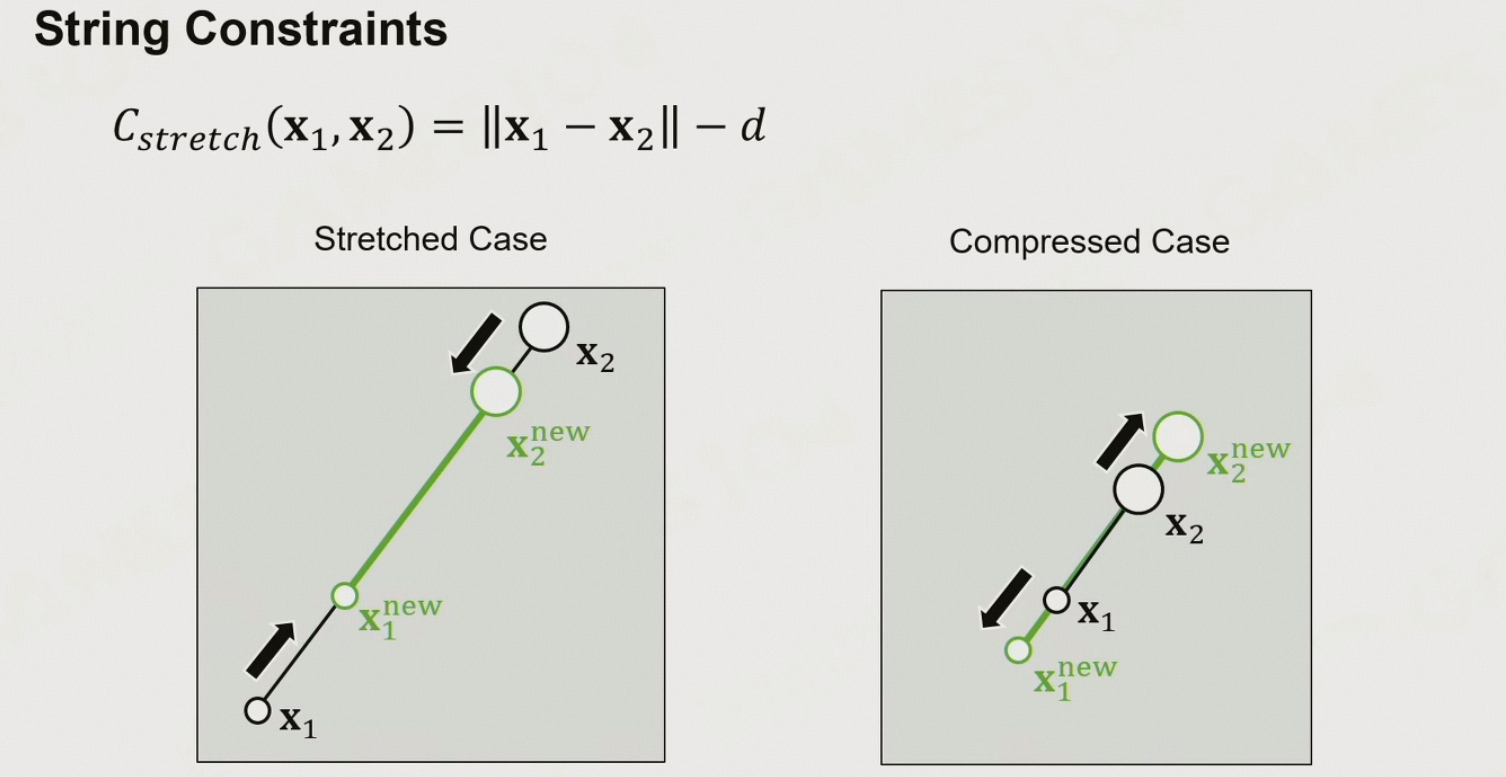
弹簧约束
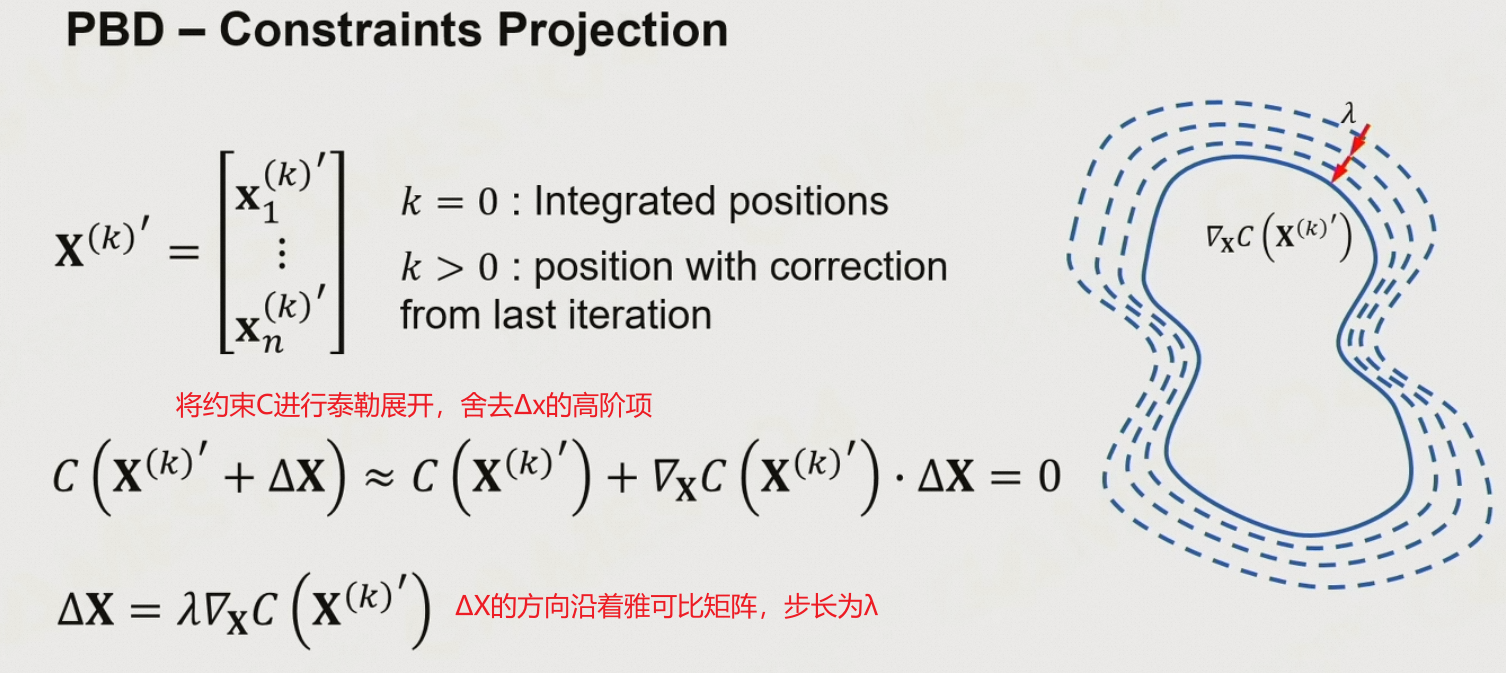
11.6.2 PBD
雅可比矩阵的作用:计算从某个状态转移到另一个状态时,每个变量的变化趋势
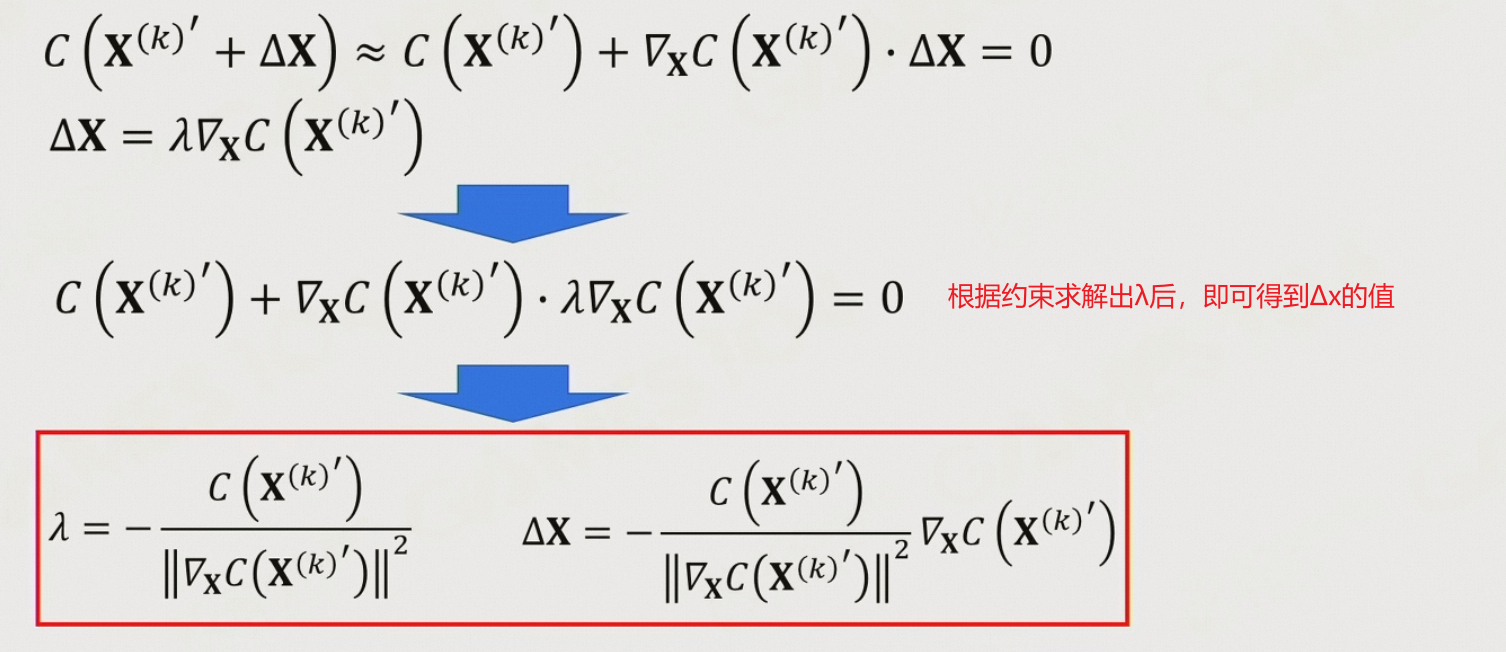
PBD:将任务表达为一系列关于位置的约束,通过雅可比矩阵,计算在当前位置应该向哪个方向扰动,每次只扰动一点点
每一步里面:
- 首先把所有v放进去,计算半隐式积分
- 判断是否由碰撞,如果有碰撞,相当于添加了一个约束
- 用刚才的方法,每一次按照λ步长进行迭代,直到误差较小
- 从而得到当前帧每个顶点的位置、速度
- 为速度添加一个damping,让PBD的计算更加稳定
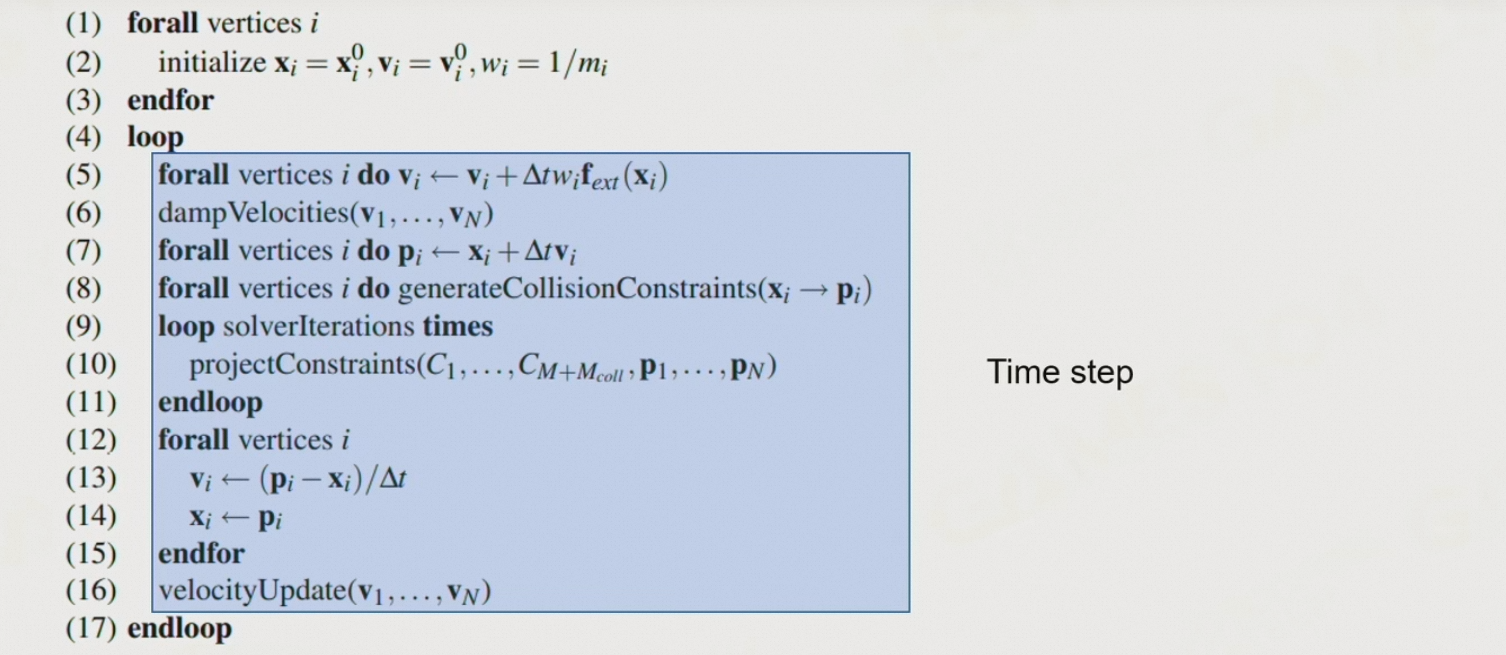
优点:稳定、收敛快
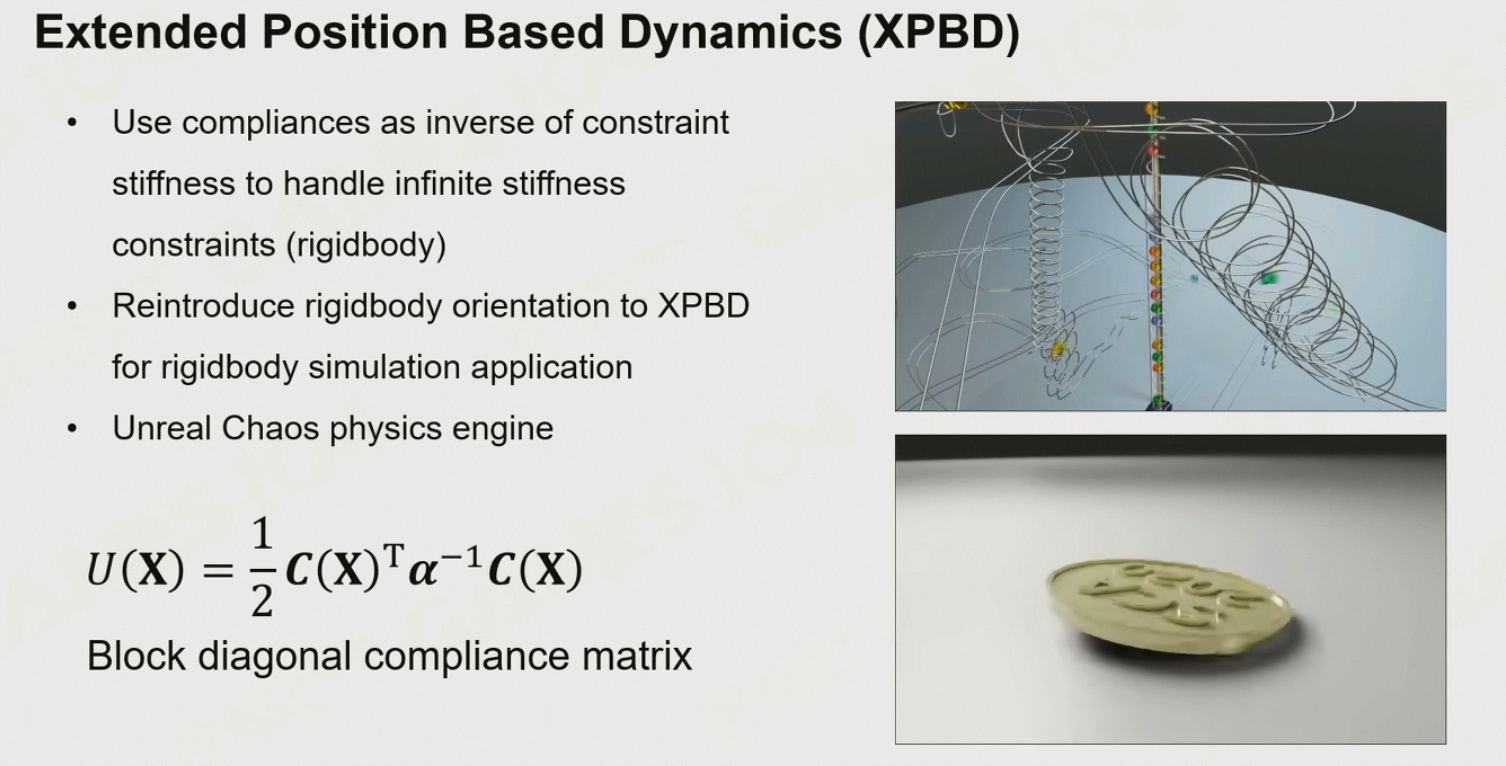
11.6.3 XPBD
- 给约束添加stiffness,表示约束的权重
- 将约束矩阵\(C(X)\)变为了服从度矩阵\(U(X)\)
- 类似于弹簧的势能,要求总体的势能最小
- 可以对不同约束设计不同的stiffness,在一个方程中求解